Інструкція по підключенню до системи SkyHunter
SkyHunter – це сучасна система моніторингу, виявлення та перехоплення повітряних цілей, що працює з командами операторів (екіпажами). Архітектура системи побудована таким чином, що кожен екіпаж має власний ізольований простір даних: свої БПЛА, свої цілі, власні журнали подій та телеметрію.
Це забезпечує безпеку доступу, розмежування відповідальності між командами та ефективну координацію дій під час виконання завдань.
1. Перше знайомство
На поточний момент система SkyHunter не передбачає вільну реєстрацію. Для того, щоб стати користувачем системи, необхідно отримати персональне запрошення на електронну пошту. Запрошення надсилається адміністратором або відповідальною особою вашого підрозділу.
1.1. Отримання запрошення та створення паролю
У листі, яке ви отримаєте, буде розміщене спеціальне посилання на сторінку встановлення власного паролю.
Після переходу за посиланням відкриється форма, де потрібно: - ввести новий пароль; - підтвердити його повторним введенням; - зберегти зміни.
Рекомендується використовувати складний пароль, що містить великі та малі літери, цифри та спеціальні символи – це підвищить рівень безпеки доступу до системи.
Після успішного встановлення паролю обліковий запис буде створено.
1.2. Вхід до особистого кабінету
Після створення паролю користувач отримує можливість увійти до системи через сторінку авторизації.
На сторінці входу необхідно: - ввести свою електронну адресу; - ввести встановлений пароль; - натиснути кнопку входу.
Після успішної авторизації відкриється особистий кабінет користувача.
2. Управління екіпажами (Crews)
У системі SkyHunter вся робота організована через екіпажі (Crews).
Екіпаж – це окрема робоча група операторів, що має власні БПЛА, цілі та журнали подій.
В особистому кабінеті користувач має можливість: - переглядати список доступних екіпажів; - створювати нові екіпажі (за наявності відповідних прав); - додавати або видаляти учасників; - керувати доступом до даних.
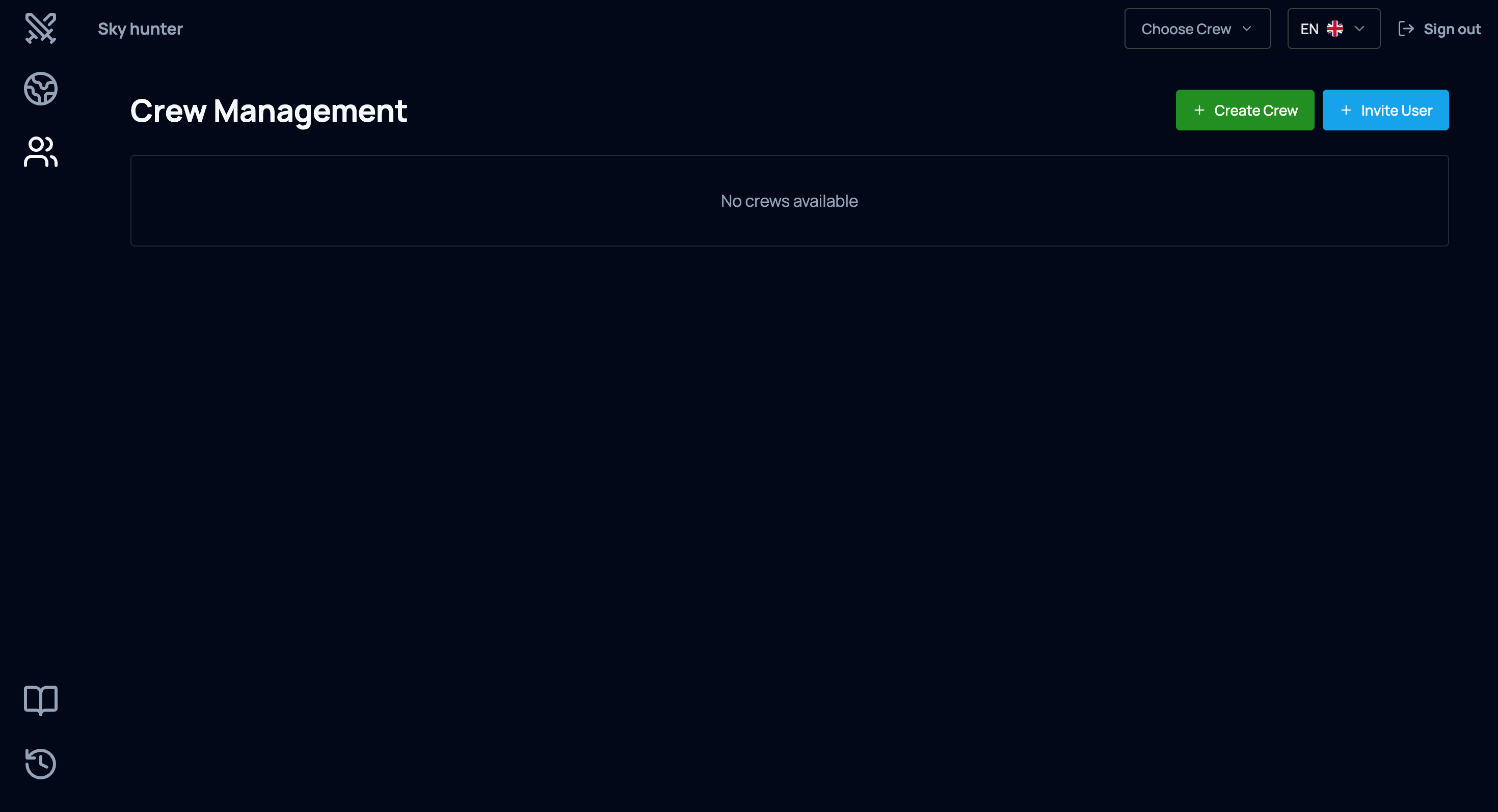
Для переходу до управління екіпажами натискаємо Manage Crews, що знаходиться в лівій частині інтерфейсу.
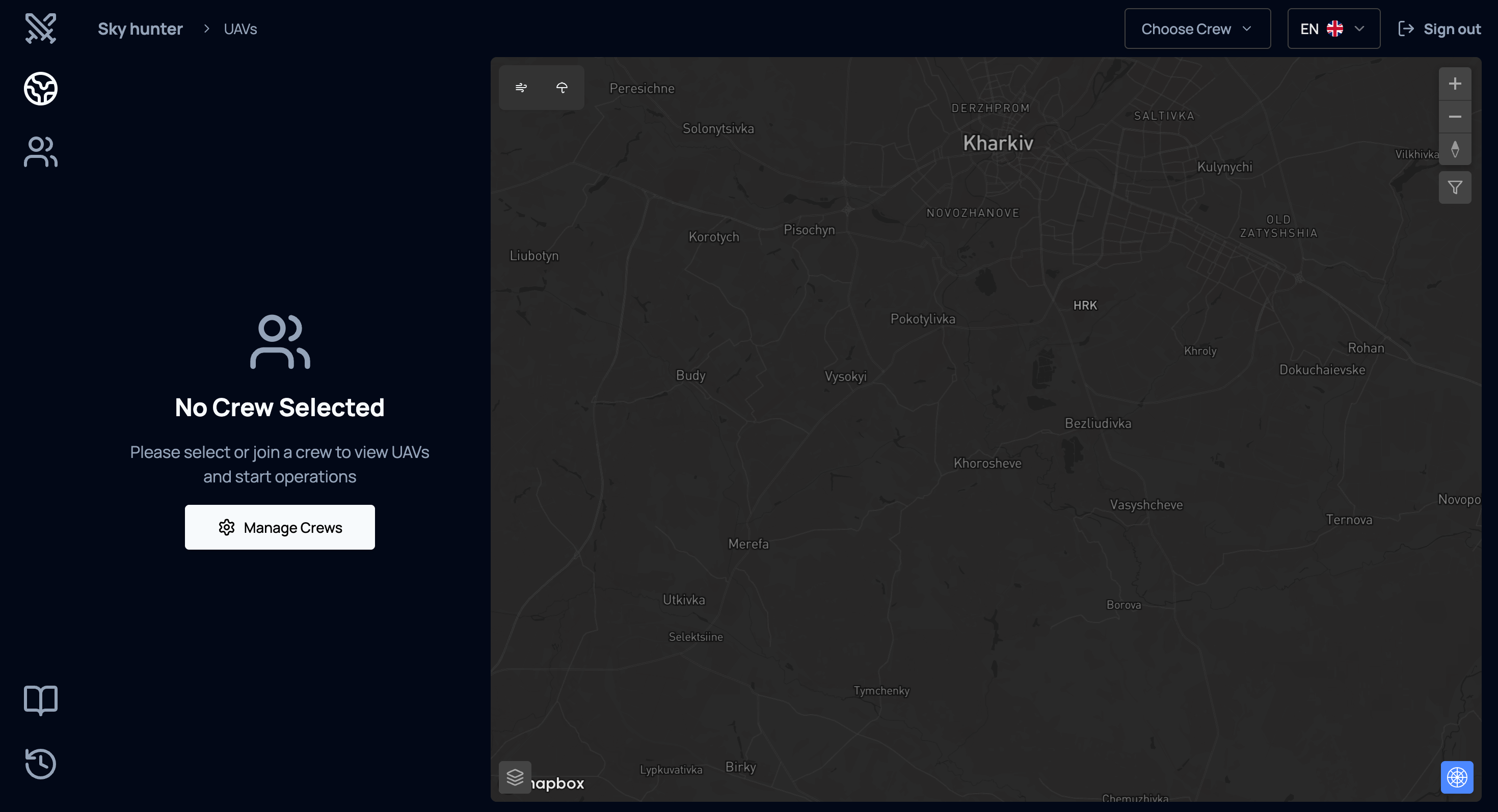
Якщо екіпажів ще не створено, система відобразить відповідне повідомлення.
2.1. Створення нового екіпажу
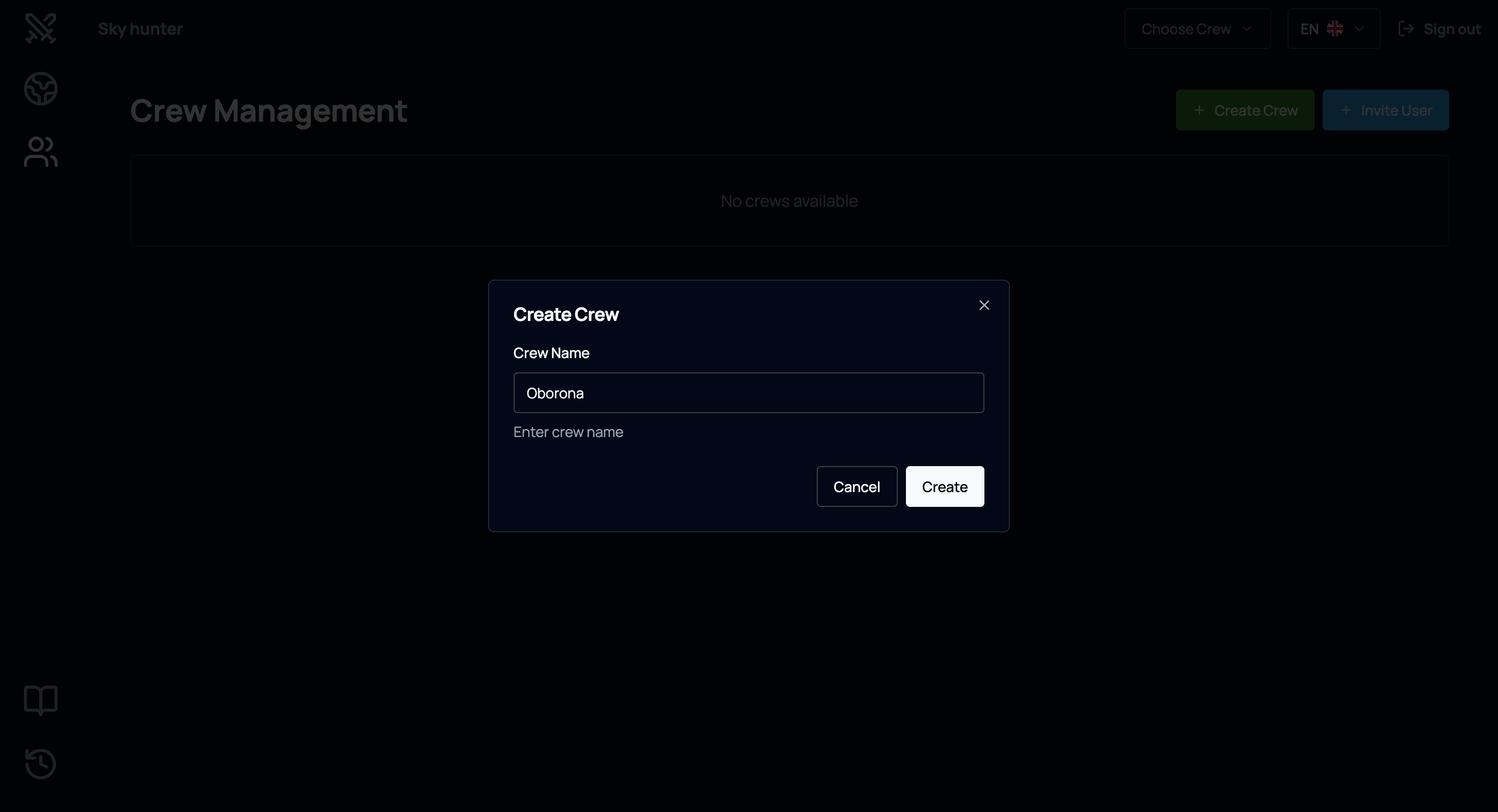
Для створення нового екіпажу необхідно натиснути кнопку Create Crew.
У формі створення екіпажу потрібно:
- задати назву екіпажу (рекомендується використовувати зрозумілу та ідентифіковану назву, наприклад: Alpha-1, Sector-East, Recon-Team-3);
- перевірити правильність введених даних;
- натиснути кнопку Create.

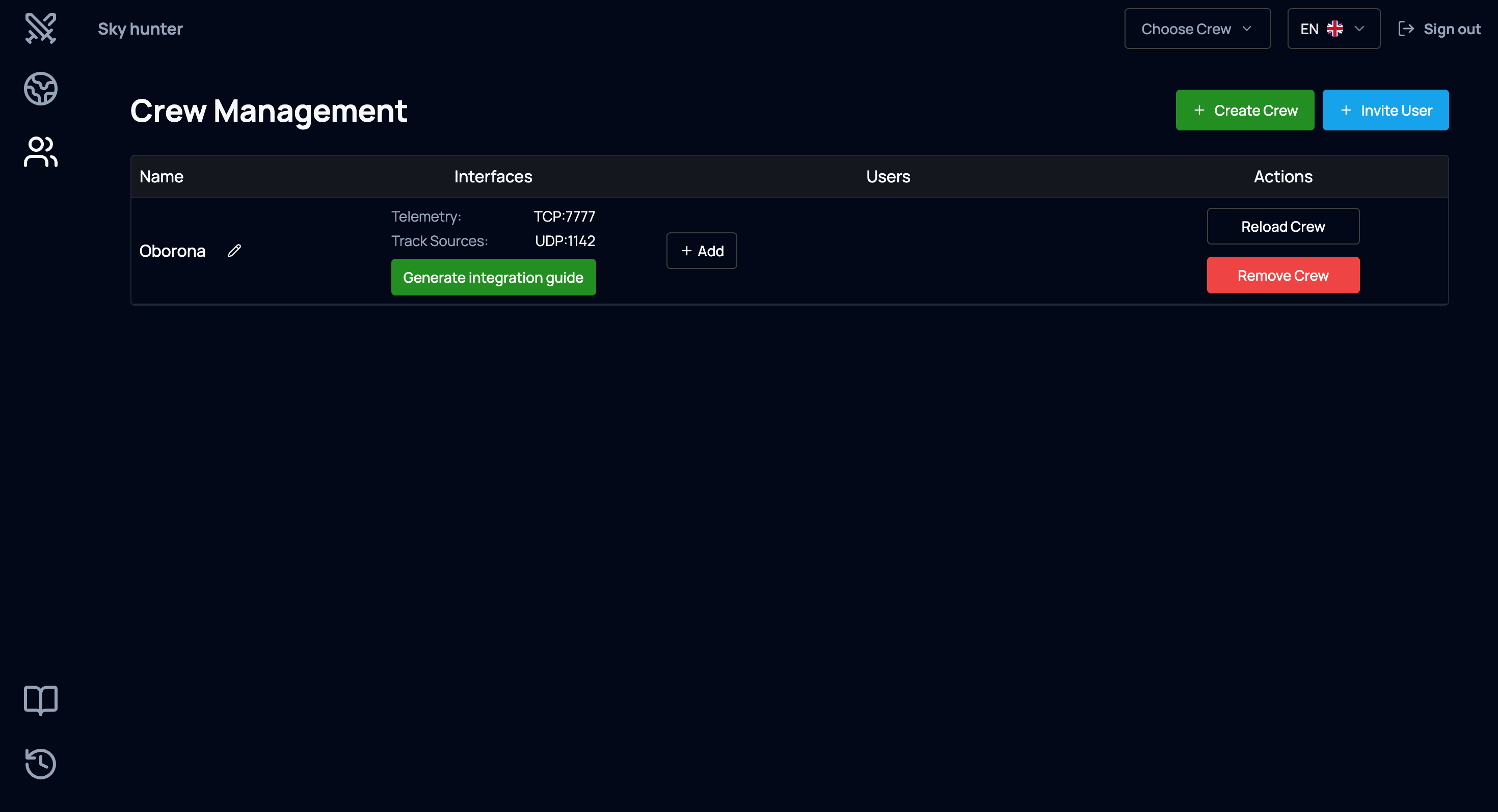
Після підтвердження новостворений екіпаж з’явиться в загальному списку екіпажів.
З цього моменту можна переходити до налаштування складу команди.
2.2. Додавання учасників до екіпажу
Для повноцінної роботи екіпажу необхідно додати до нього учасників.
У списку екіпажів обираємо потрібний екіпаж та натискаємо Add.

Відкриється список доступних користувачів системи.
Щоб додати учасника до екіпажу:
- Знайти потрібного користувача у списку.
- Натиснути кнопку Add навпроти його імені.
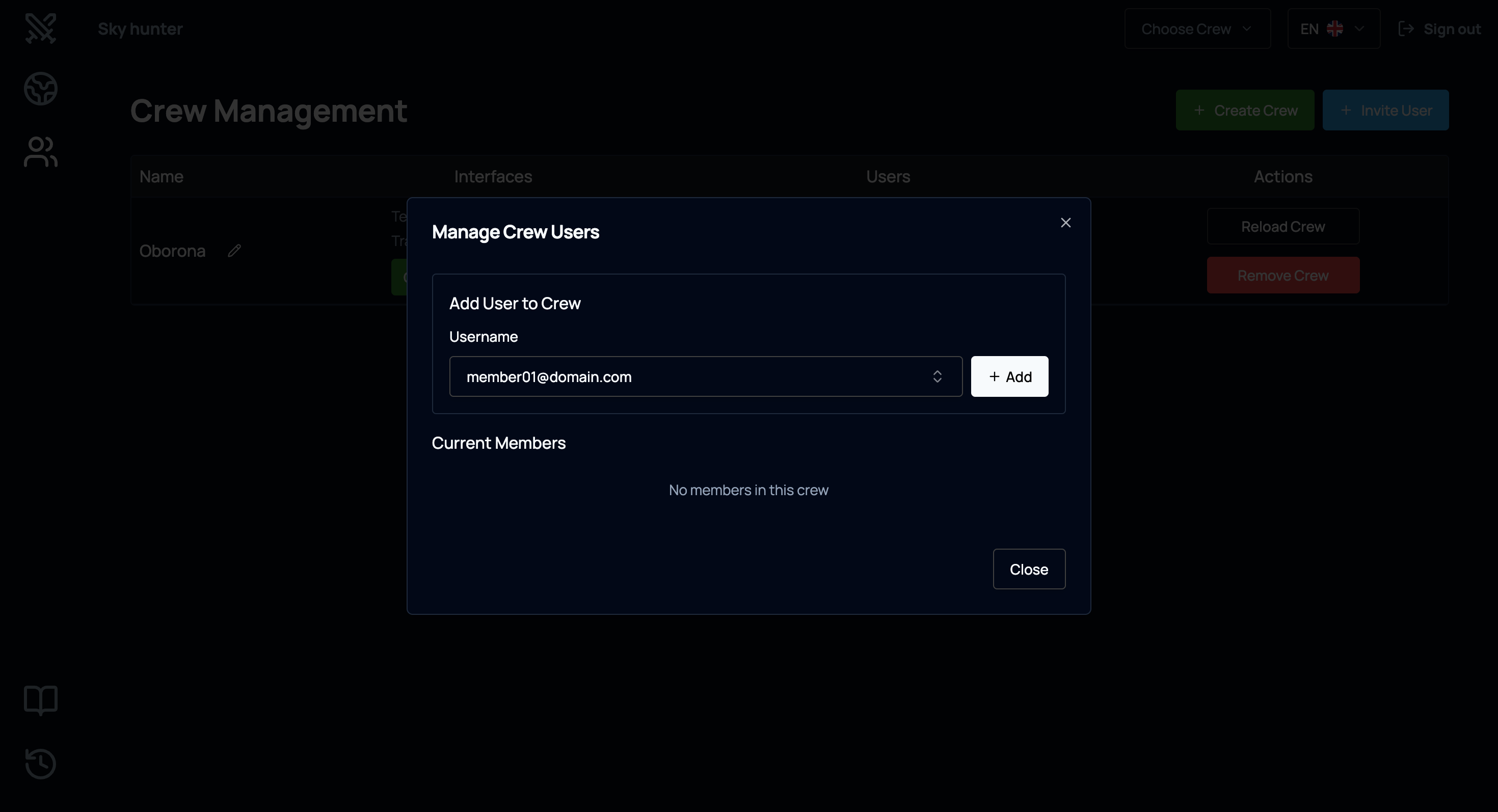
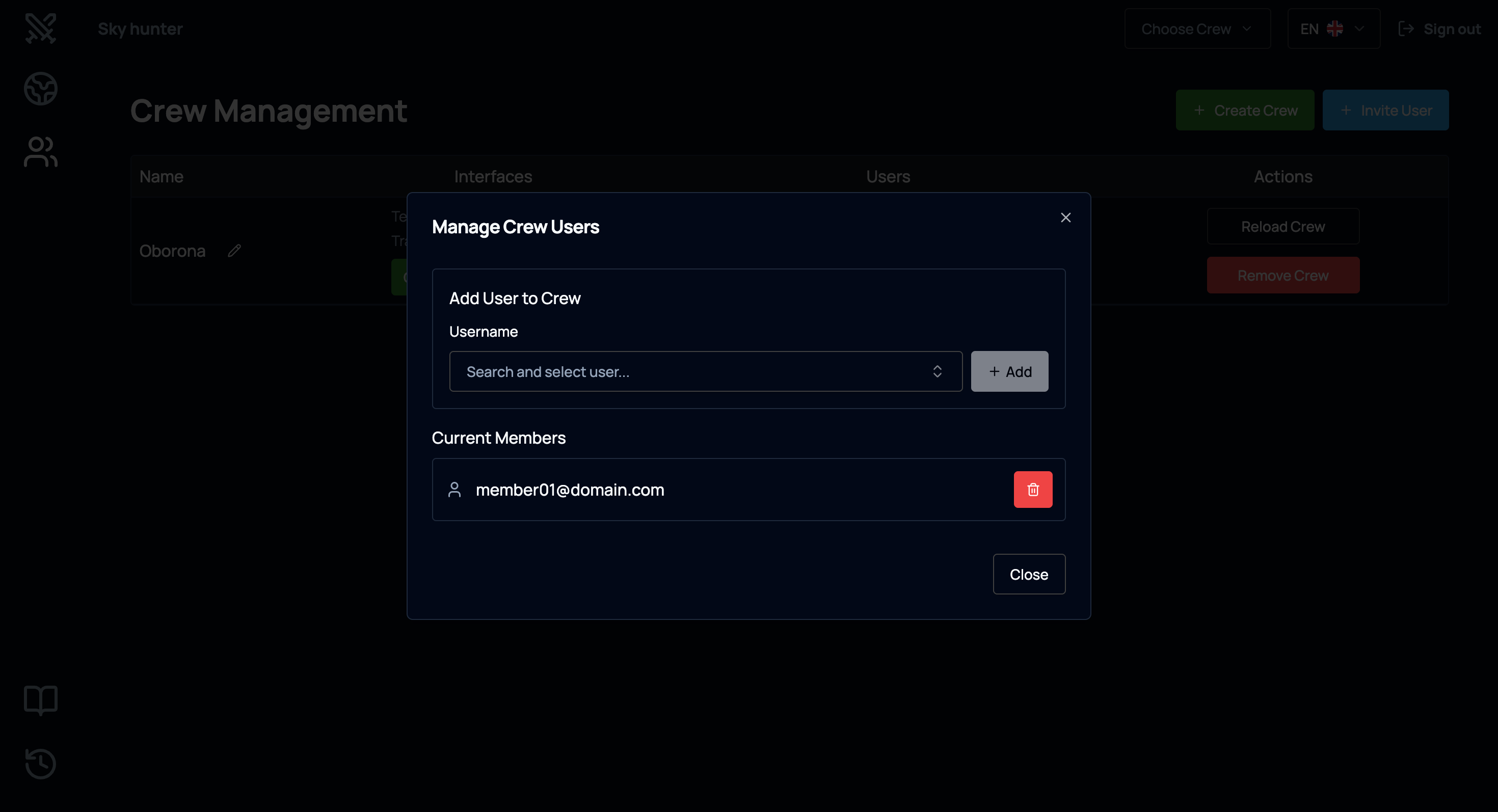
Після цього користувач буде доданий до екіпажу та отримає доступ до його простору даних відповідно до своєї ролі.
2.3. Вибір та блокування екіпажу (Lock Crew)
Для початку роботи з конкретним екіпажем відповідальний член команди (в ролі пілота) має закріпити екіпаж на собі (обрати його як активний).
Це необхідно для: - уникнення конфліктів під час одночасної роботи декількох членів екіпажу; - чіткого визначення відповідального за поточну сесію; - правильного збереження журналів подій та телеметрії.
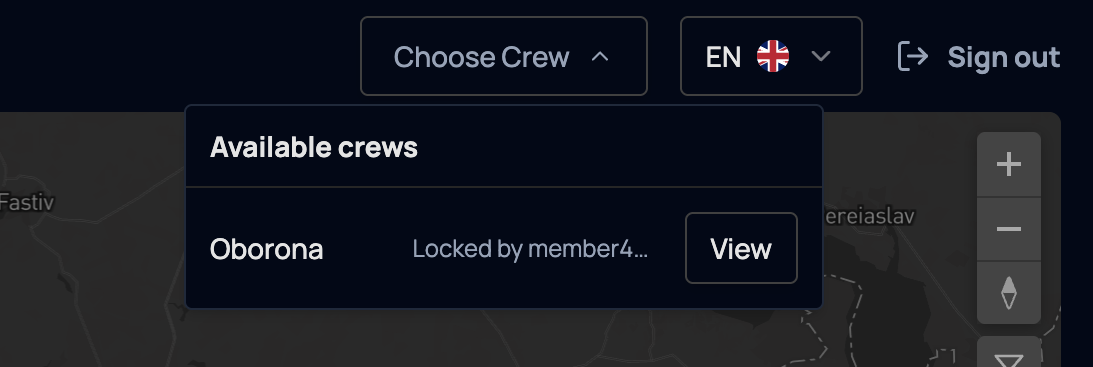
Для цього: 1. Натискаємо Choose Crew. Відкривається список екіпажів. Для кожного екіпажу відображається ім’я та, за необхідності, інформація про блокування: хто саме зараз керує цим екіпажем. Якщо екіпаж зайнятий, доступна кнопка View (перегляд у режимі спостерігача).
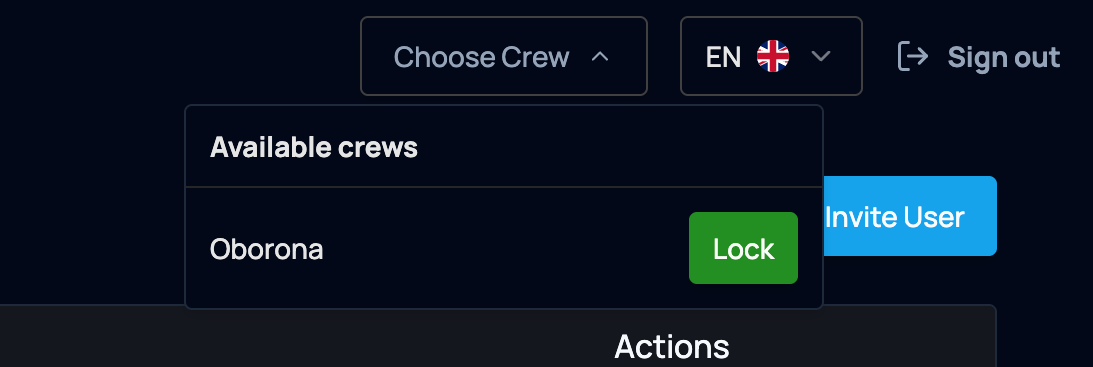
- Для вільного екіпажу доступна кнопка Lock, яка блокує екіпаж за поточним користувачем. Обираємо потрібний екіпаж зі списку і натискаємо Lock.
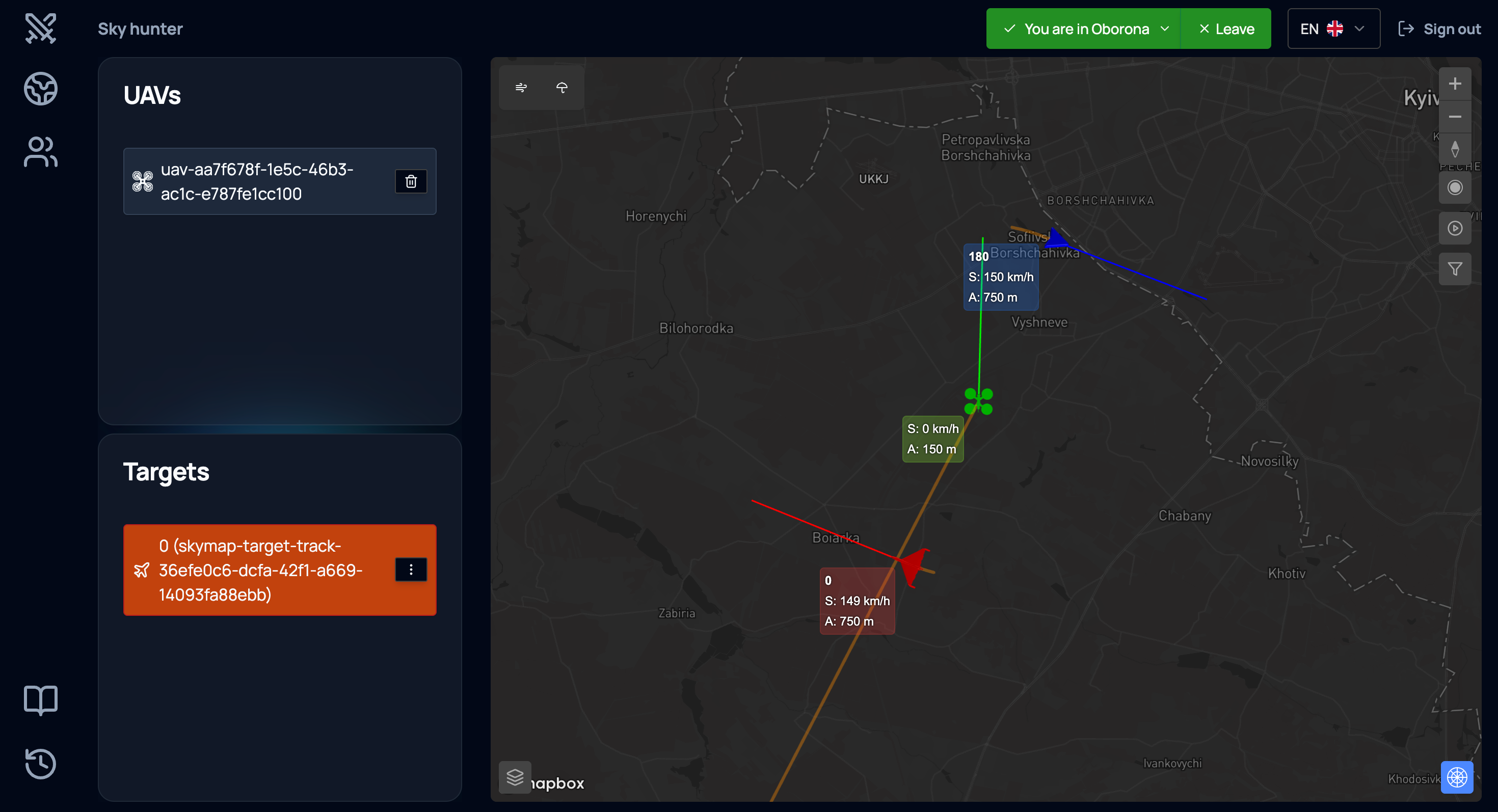
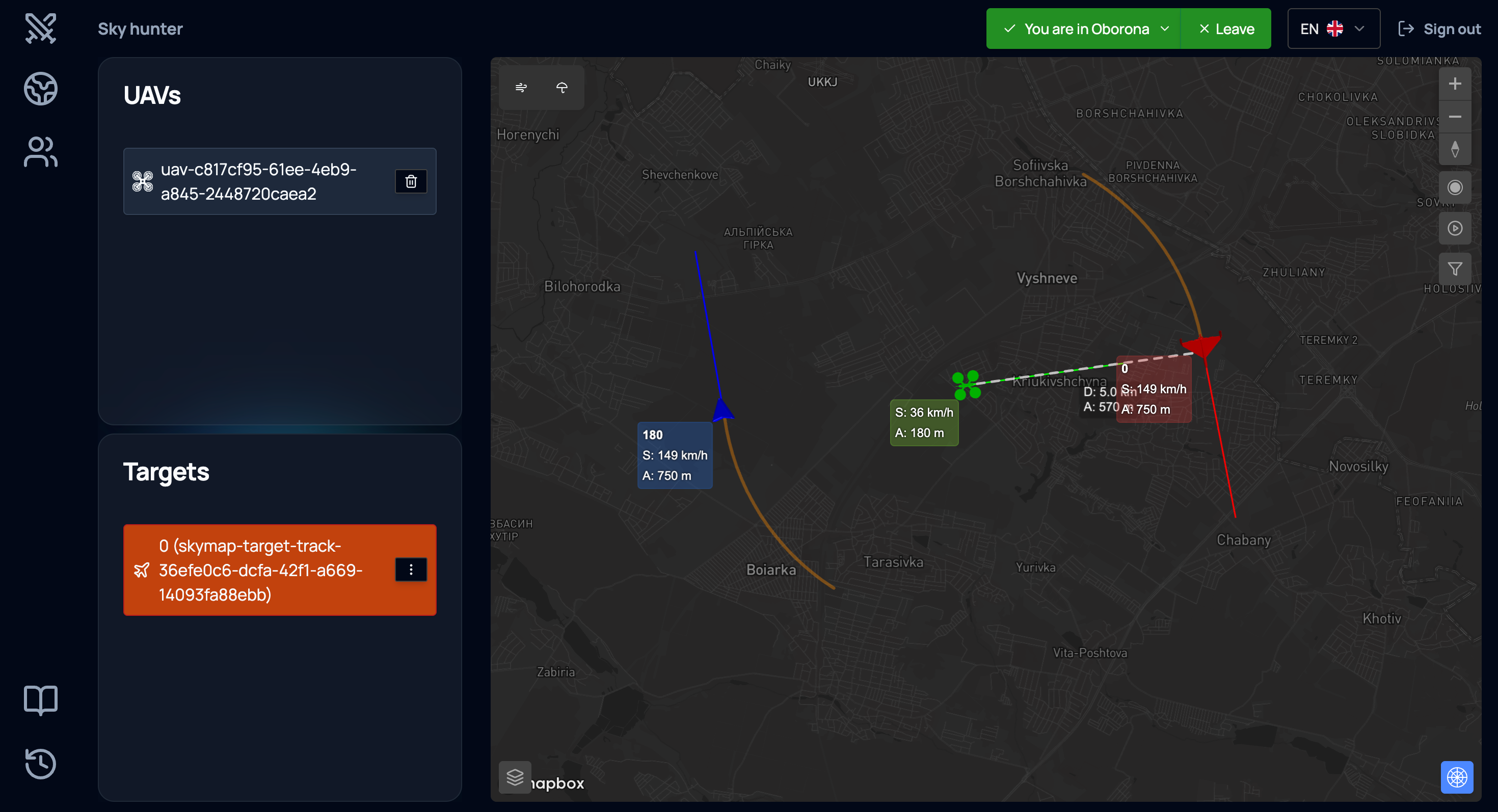
Після успішного приєднання у верхній частині екрана з’являється зелений банер «You are in ...». Ліва панель показує блоки UAVs та Targets, які спочатку порожні (якщо до екіпажу ще не підключено БПЛА та не видано цілі).
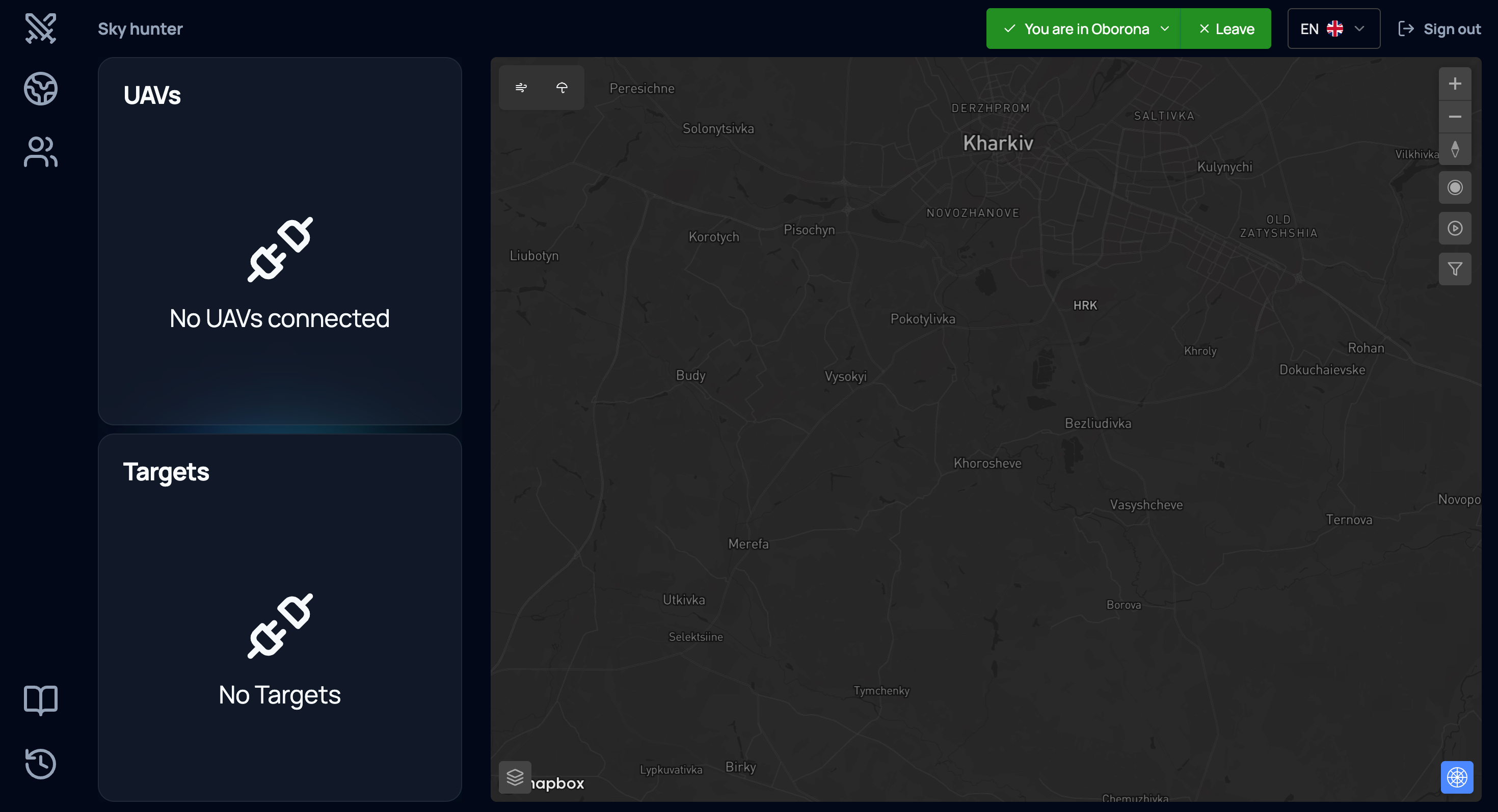
Після вибору екіпаж стає активним, і всі подальші дії (моніторинг, керування БПЛА, робота з цілями, ведення журналів) виконуються в межах саме цього екіпажу.
3. Симулятор
Для тестування інтерфейсу, навчання операторів або відпрацювання сценаріїв без підключення реального дрона використовується симулятор БПЛА. Це повноцінний віртуальний об’єкт у системі, який імітує поведінку реального літального апарата: рух, телеметрію, зміну висоти та швидкості.
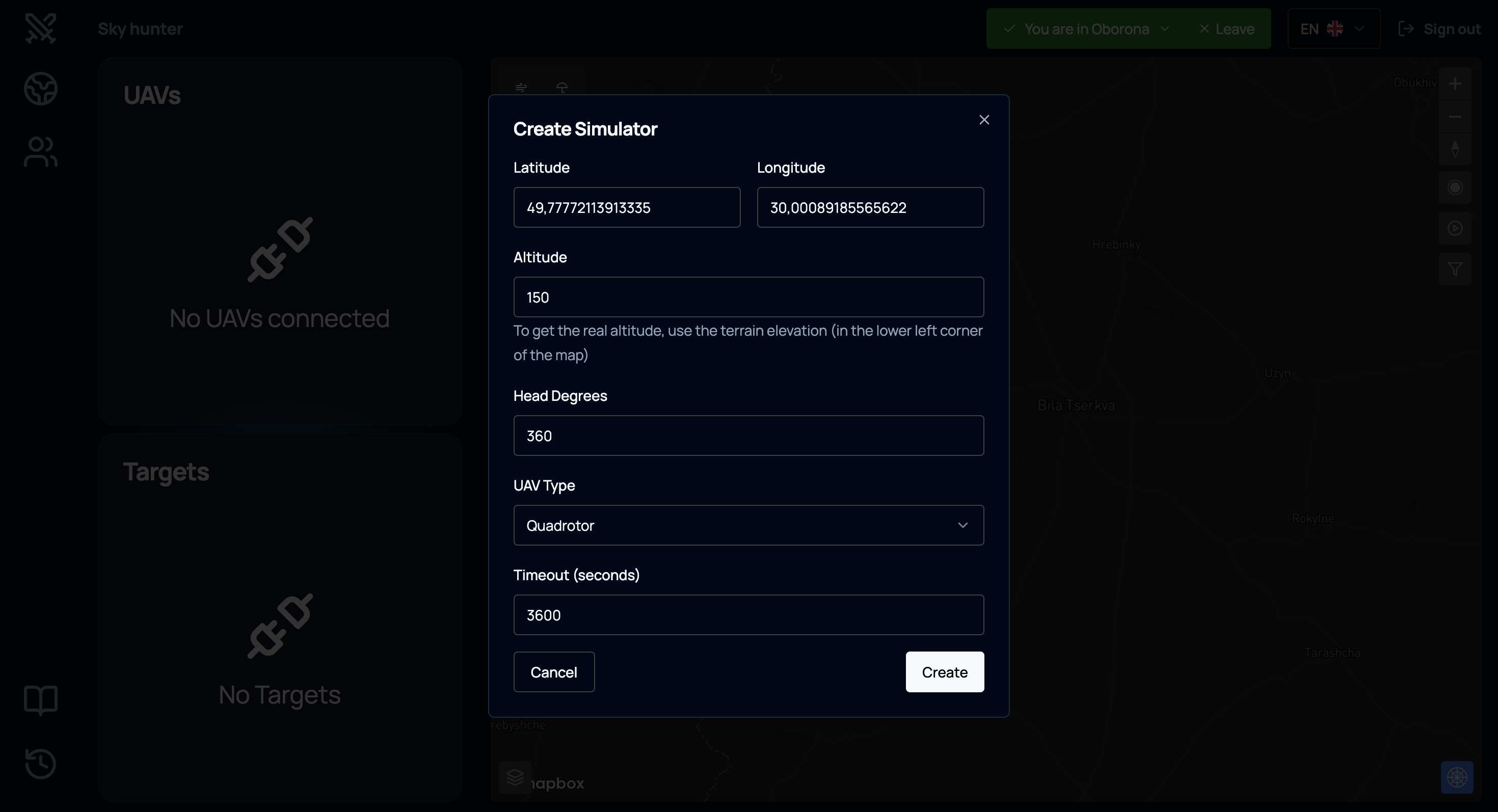
3.1. Створення симулятору
Симулятор створюється безпосередньо з мапи. Для цього: 1. Наведіть курсор на потрібну точку на мапі. 2. Натисніть ліву кнопку миші. 3. У контекстному меню оберить Create Simulator.
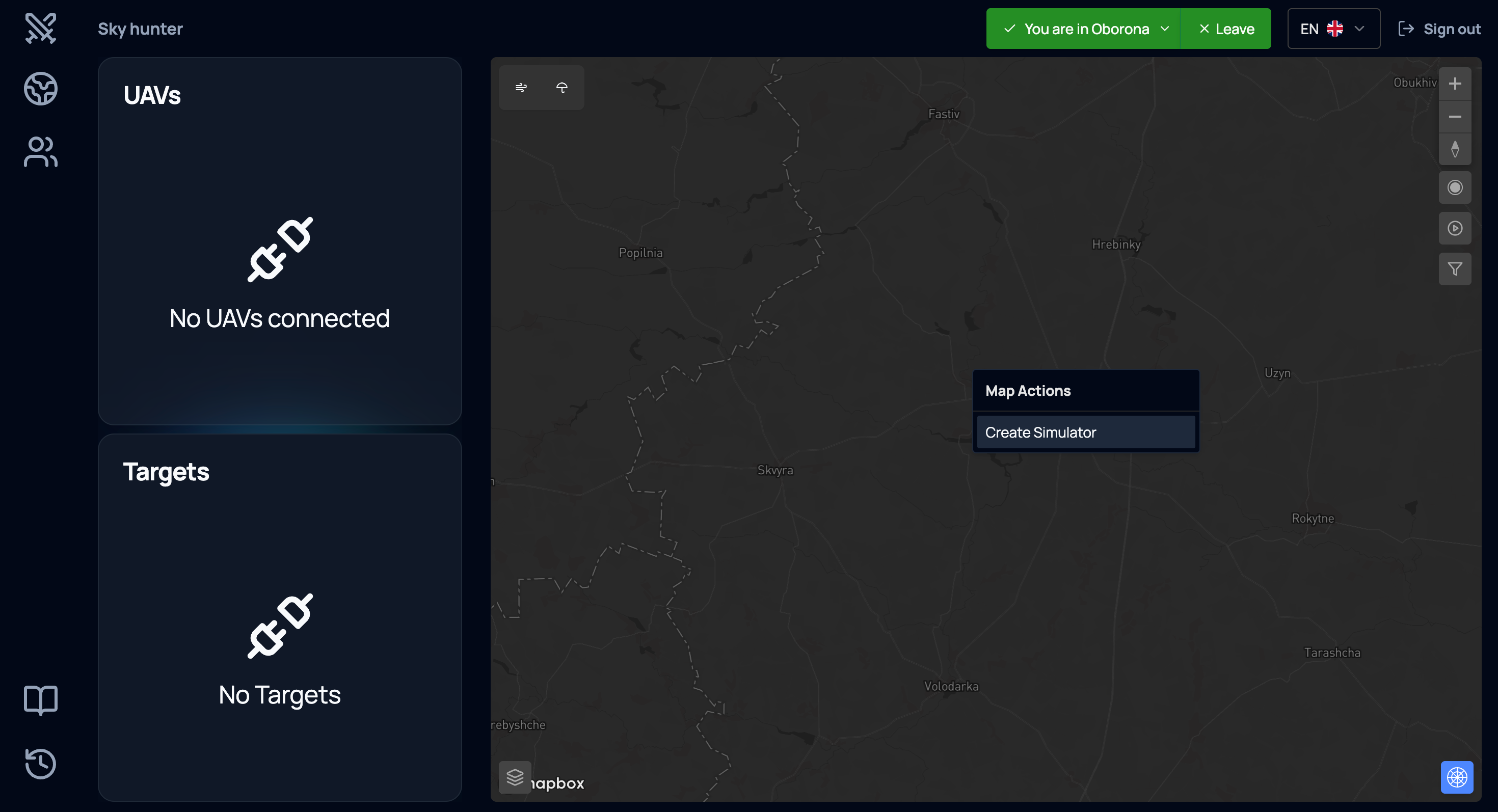
Після виконання команди система створює віртуальний БПЛА, який автоматично: - прив’язується до активного екіпажу; - отримує початкові координати у точці кліку; - починає передавати симульовану телеметрію.
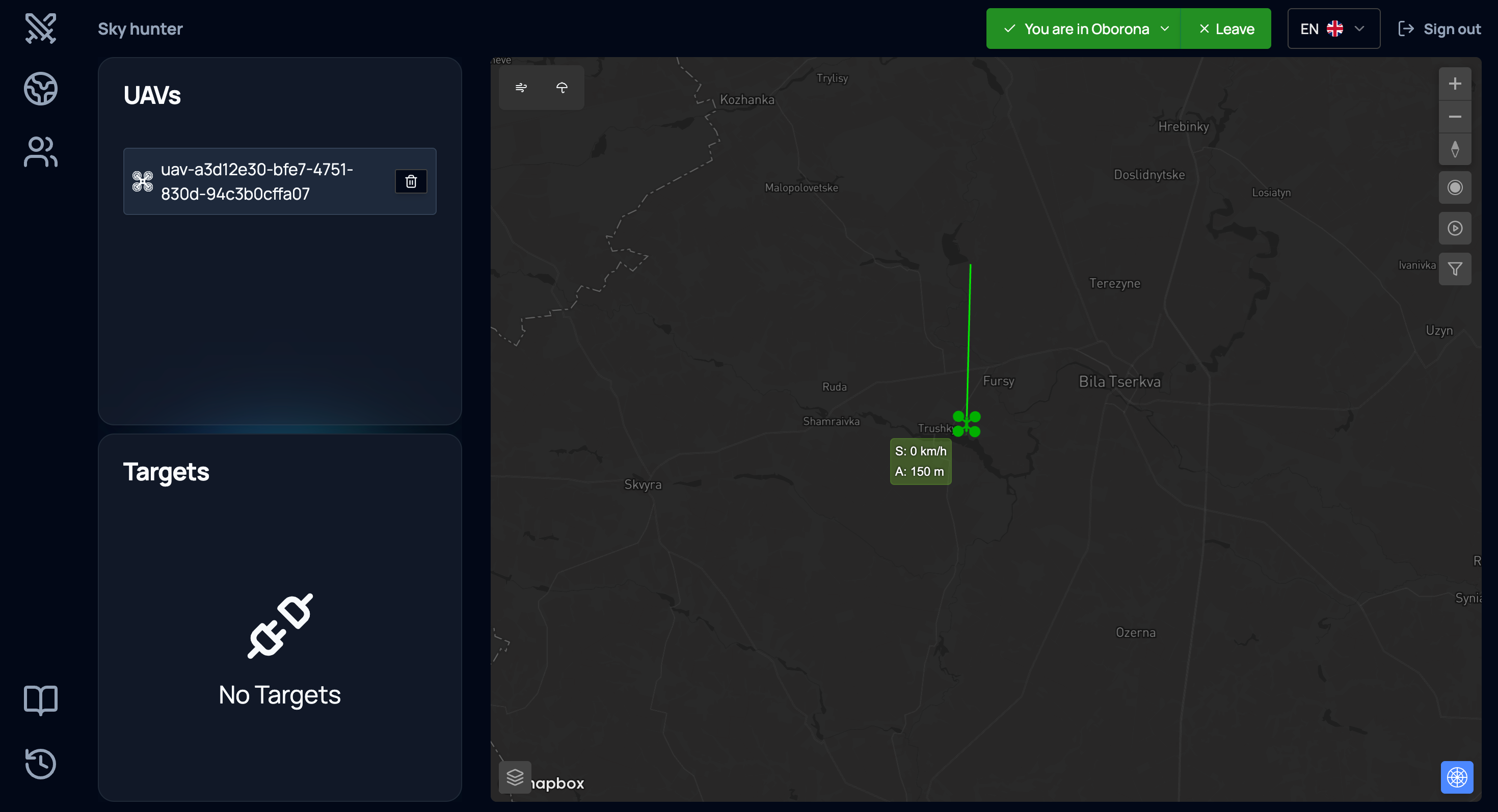
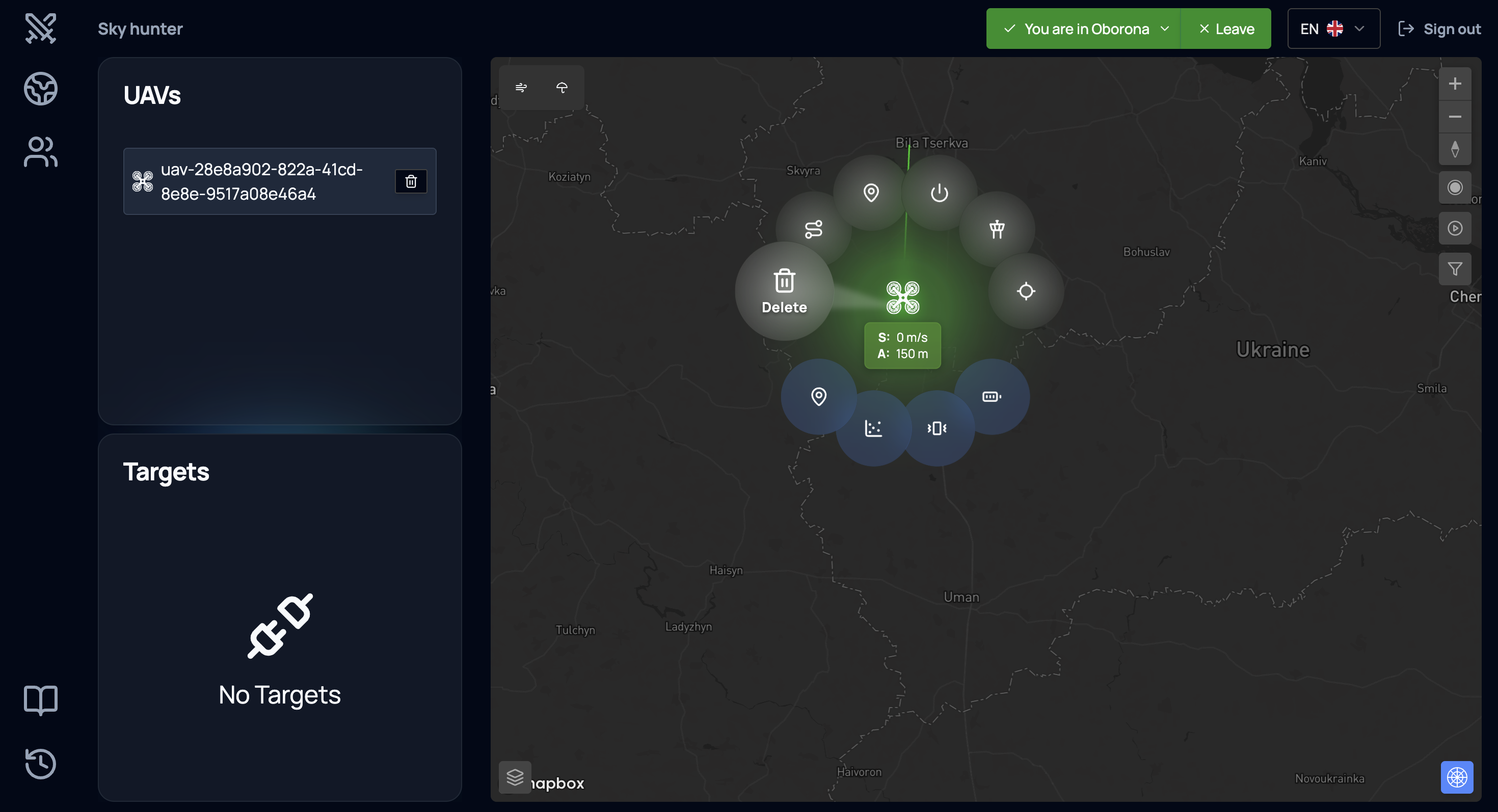
Через 1–3 хвилини (час ініціалізації сервісів та синхронізації даних) на мапі з’являється зелена іконка обраного типу симулятора – це активований симульований БПЛА.
Разом із дроном відображається: - зелена лінія - напрямок польоту; - телеметричне вікно зі швидкістю (S, km/h); - висота польоту (A, m).
Симулятор дозволяє: - тестувати режими керування; - перевіряти алгоритми супроводу цілей; - відпрацьовувати взаємодію між кількома БПЛА; - навчати нових операторів без ризику для реального обладнання.
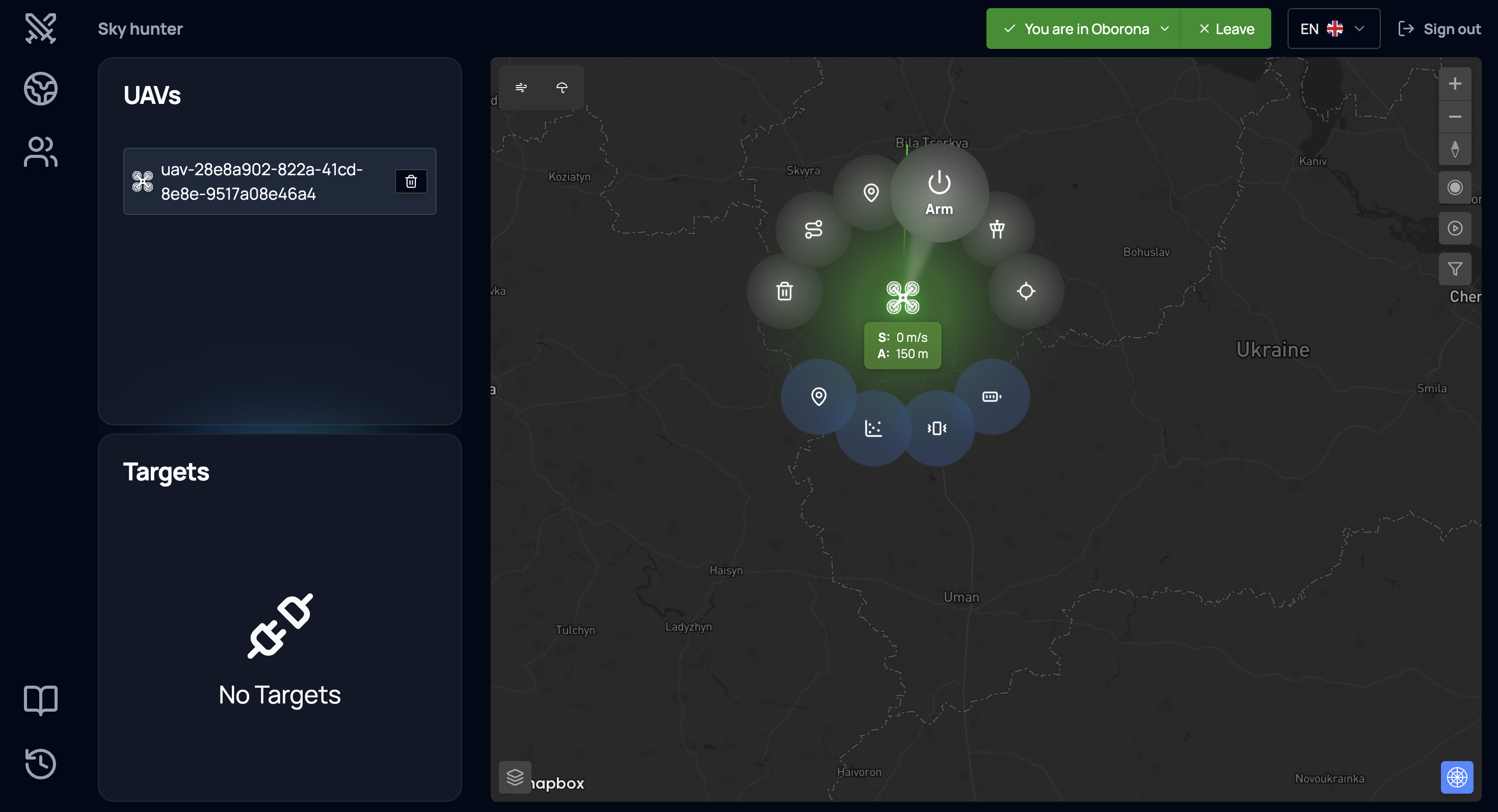
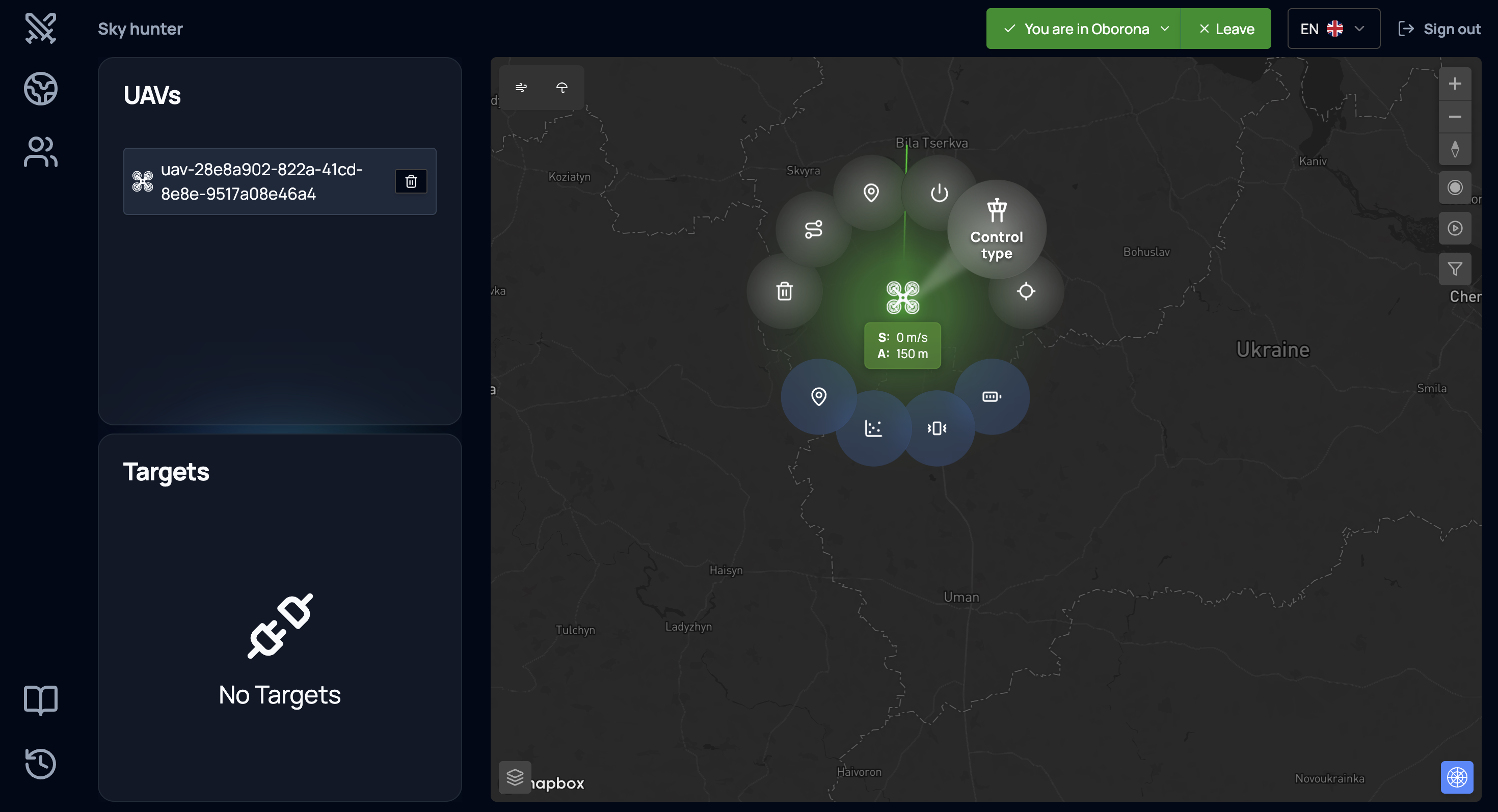
3.2. Радіальне меню БПЛА
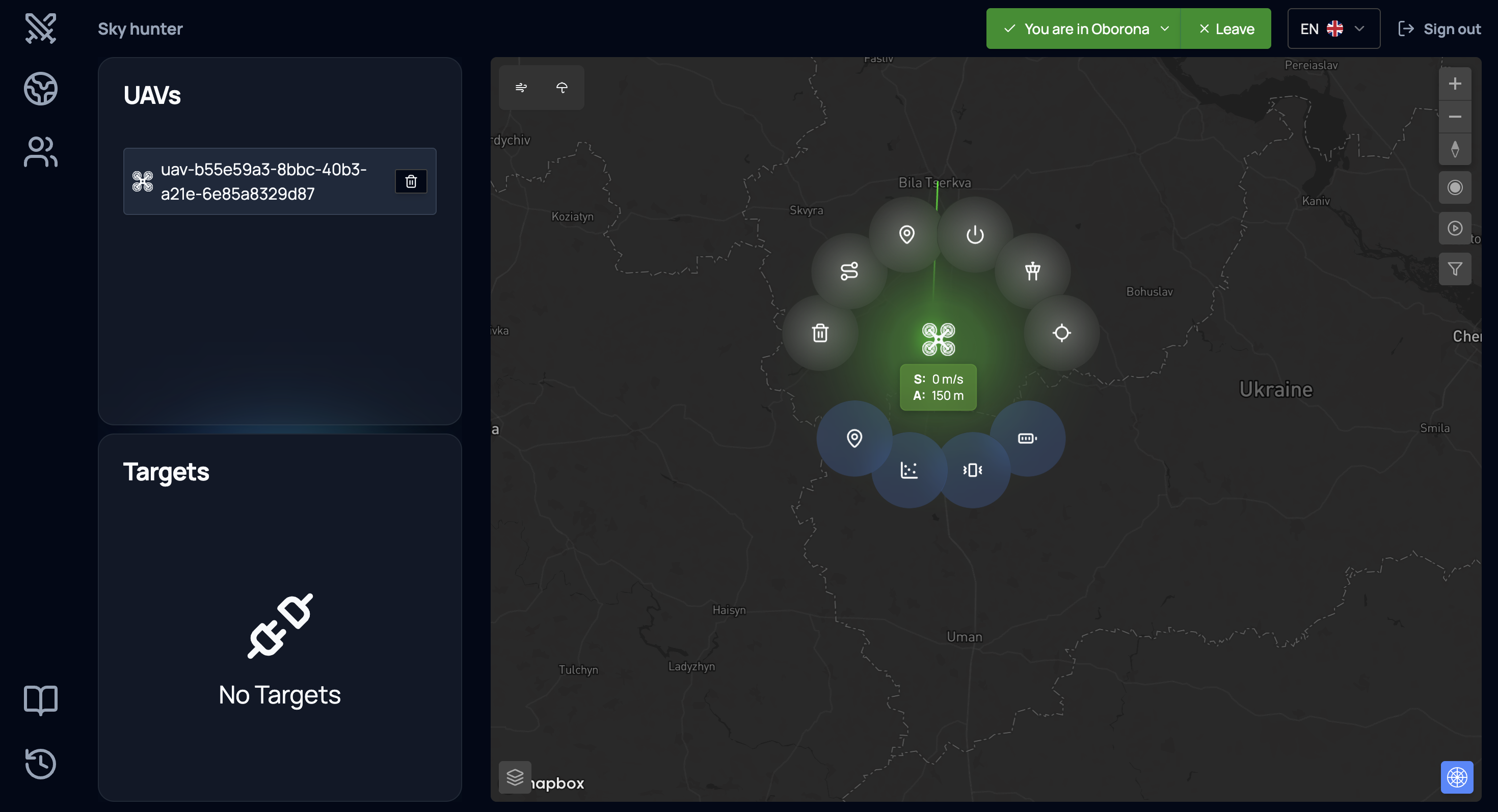
Для детального керування БПЛА в SkyHunter використовується радіальне меню – інтуїтивний інтерфейс швидкого доступу до команд та діагностики.
Меню відкривається натисканням на іконку дрона на мапі. Після цього навколо БПЛА з’являється коло керування, яке розділене на дві функціональні зони: - верхня секція – оперативні команди керування; - нижня секція – діагностика та технічні параметри.
3.2.1. Верхня секція – оперативне керування
У верхній секції розташовані основні команди, які впливають на поведінку БПЛА в реальному часі.
Arm/Disarm
Команда ініціалізації та запуску моторів. Після активації дрон переходить у стан готовності до польоту.
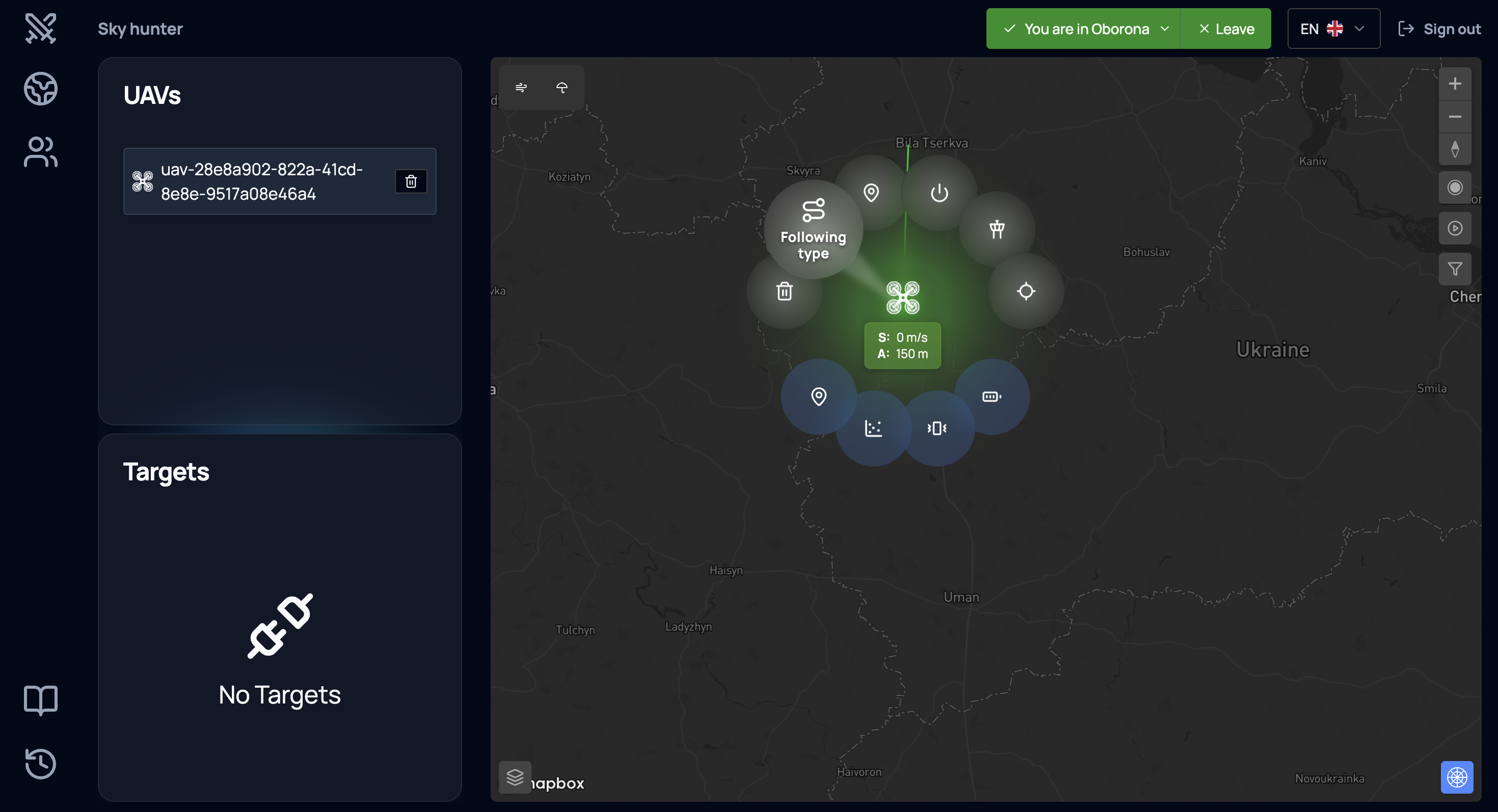
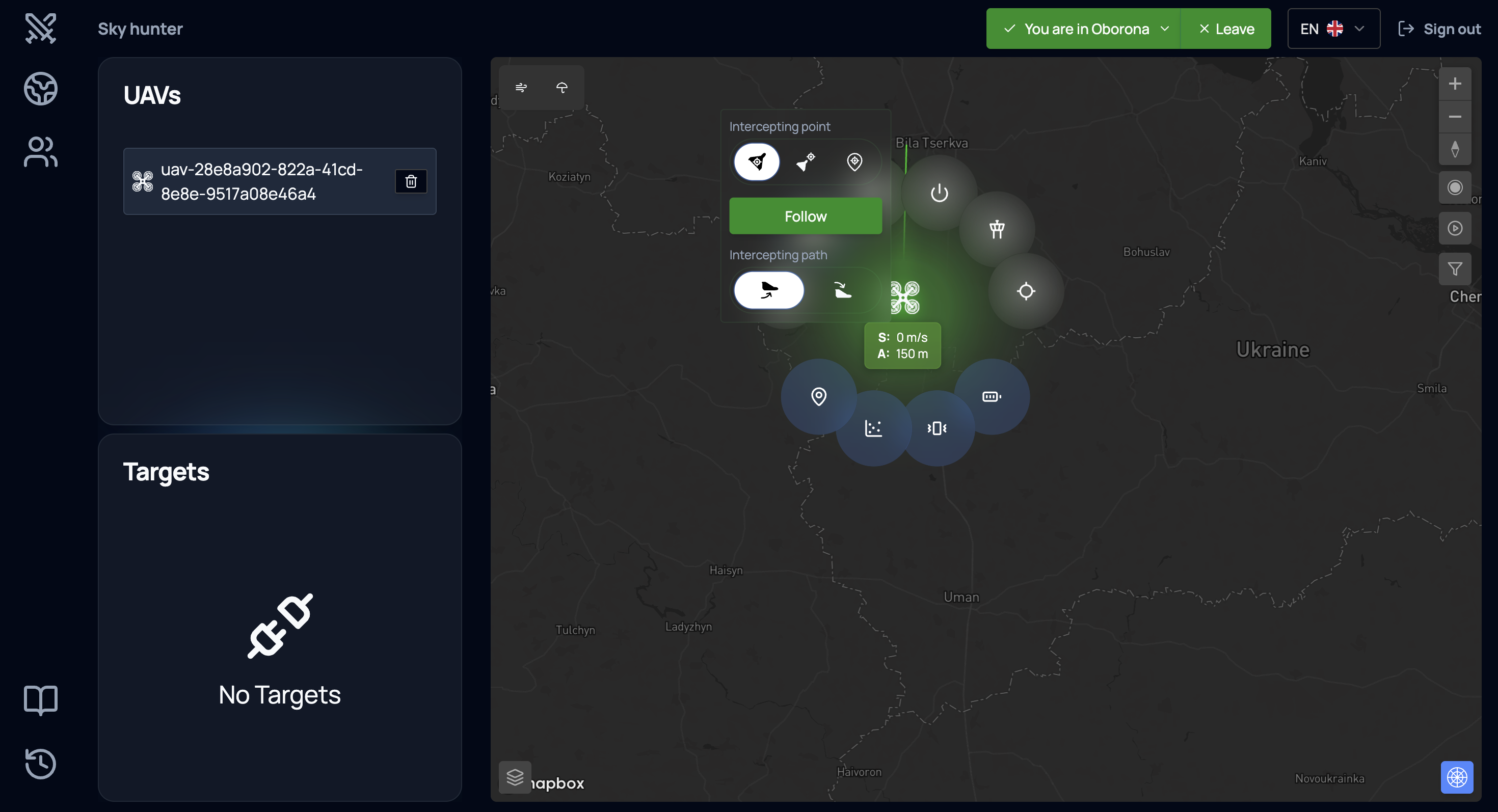
Following type
Відкриває налаштування алгоритму супроводу цілі (тип перехоплення). Доступні різні моделі поведінки – наприклад, пряме переслідування, перехоплення з випередженням або політ по заданим координатам.
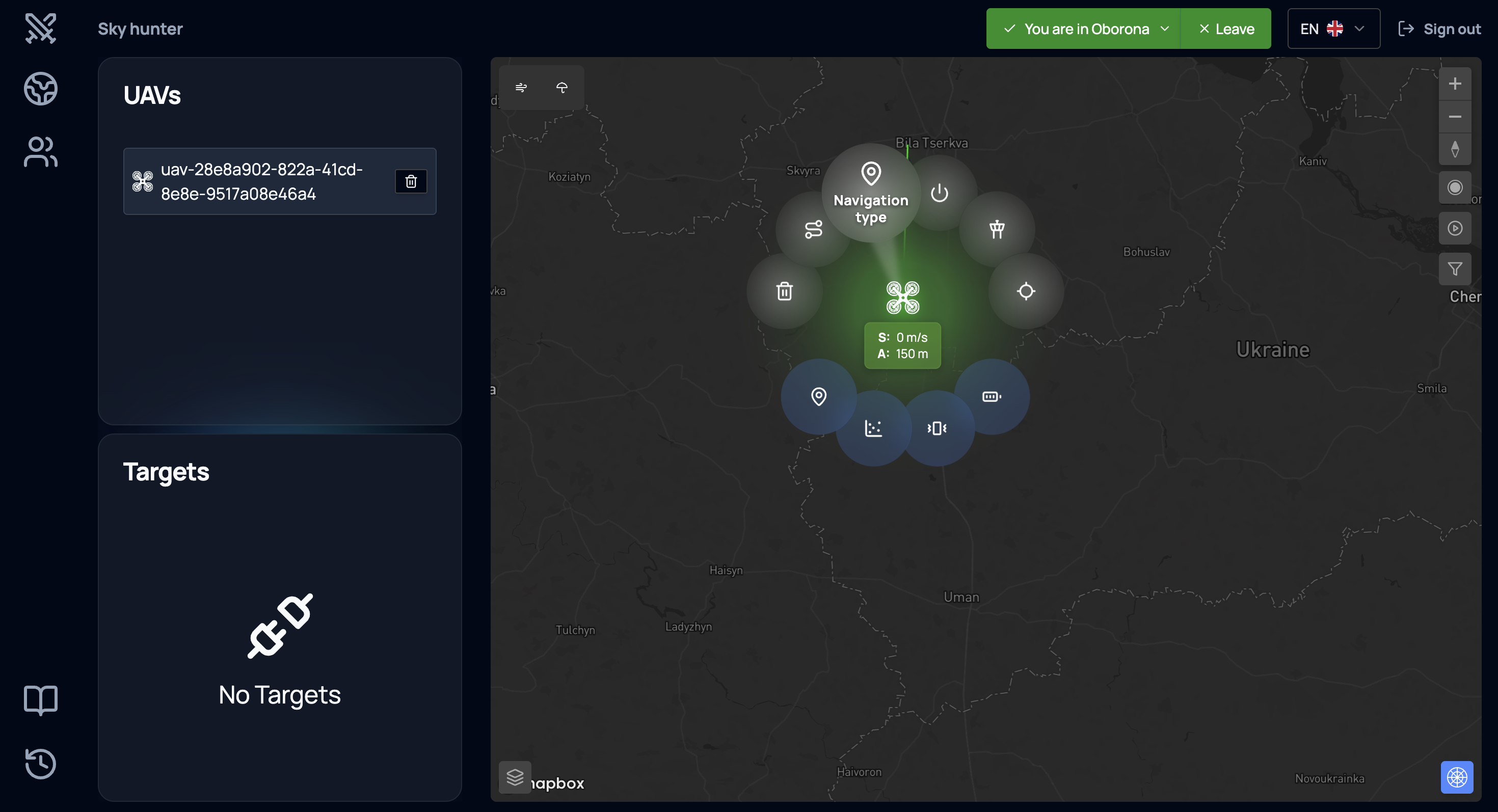
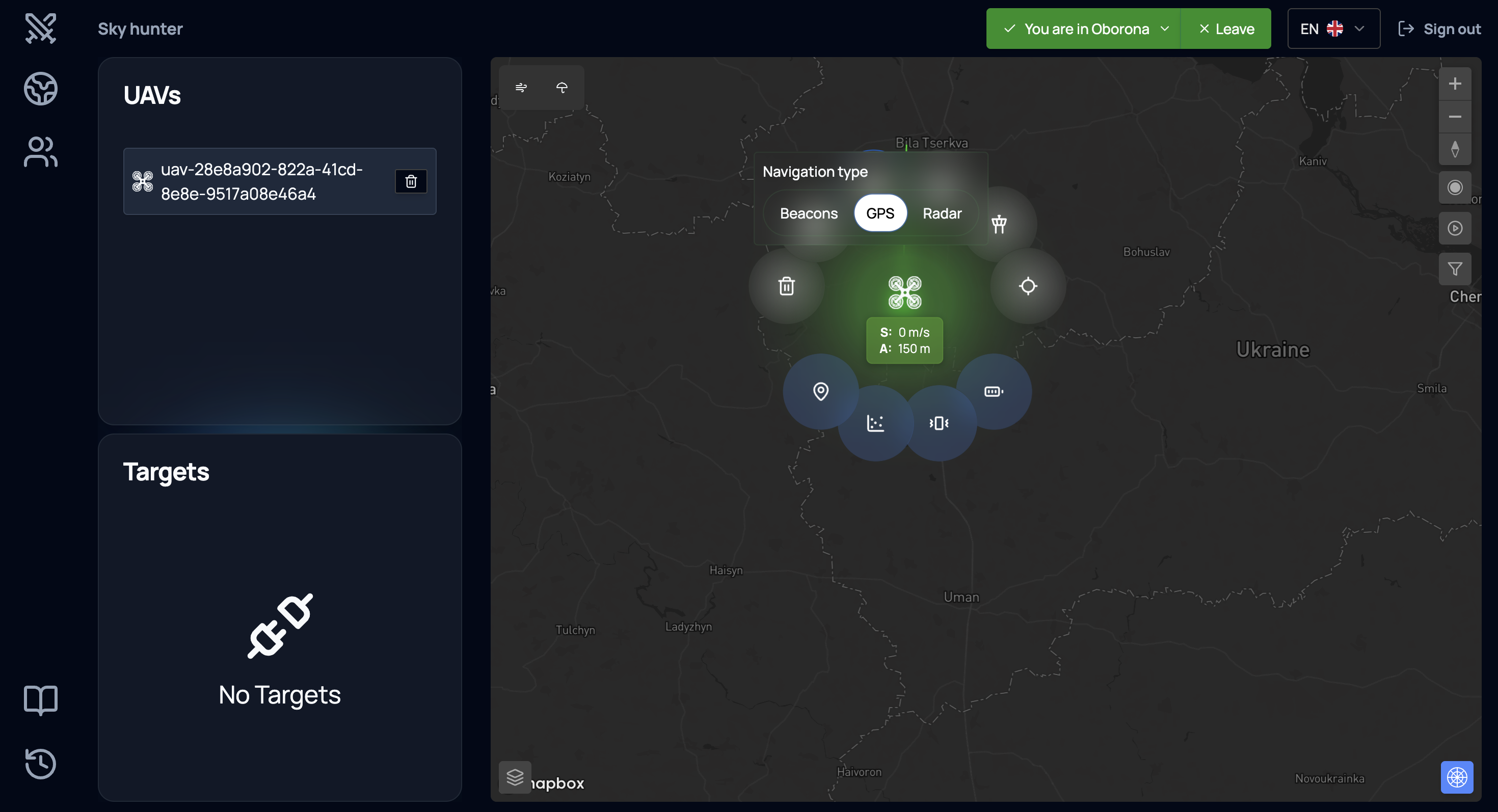
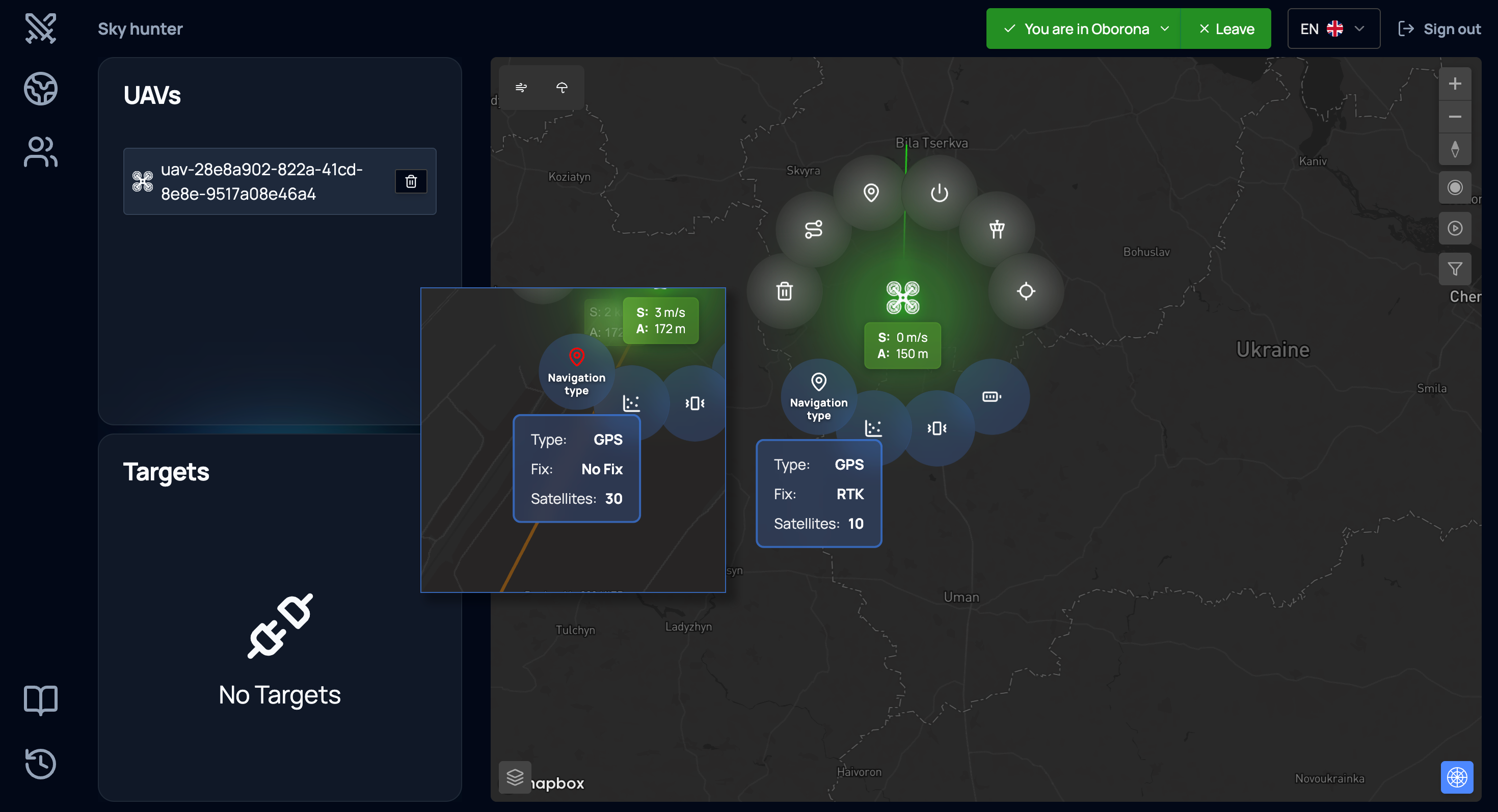
Navigation type
Дозволяє обрати джерело навігації:
- Beacons – позиціонування через наземні маяки;
- GPS – супутникова навігація;
- Radar – позиціонування на основі радарних даних.
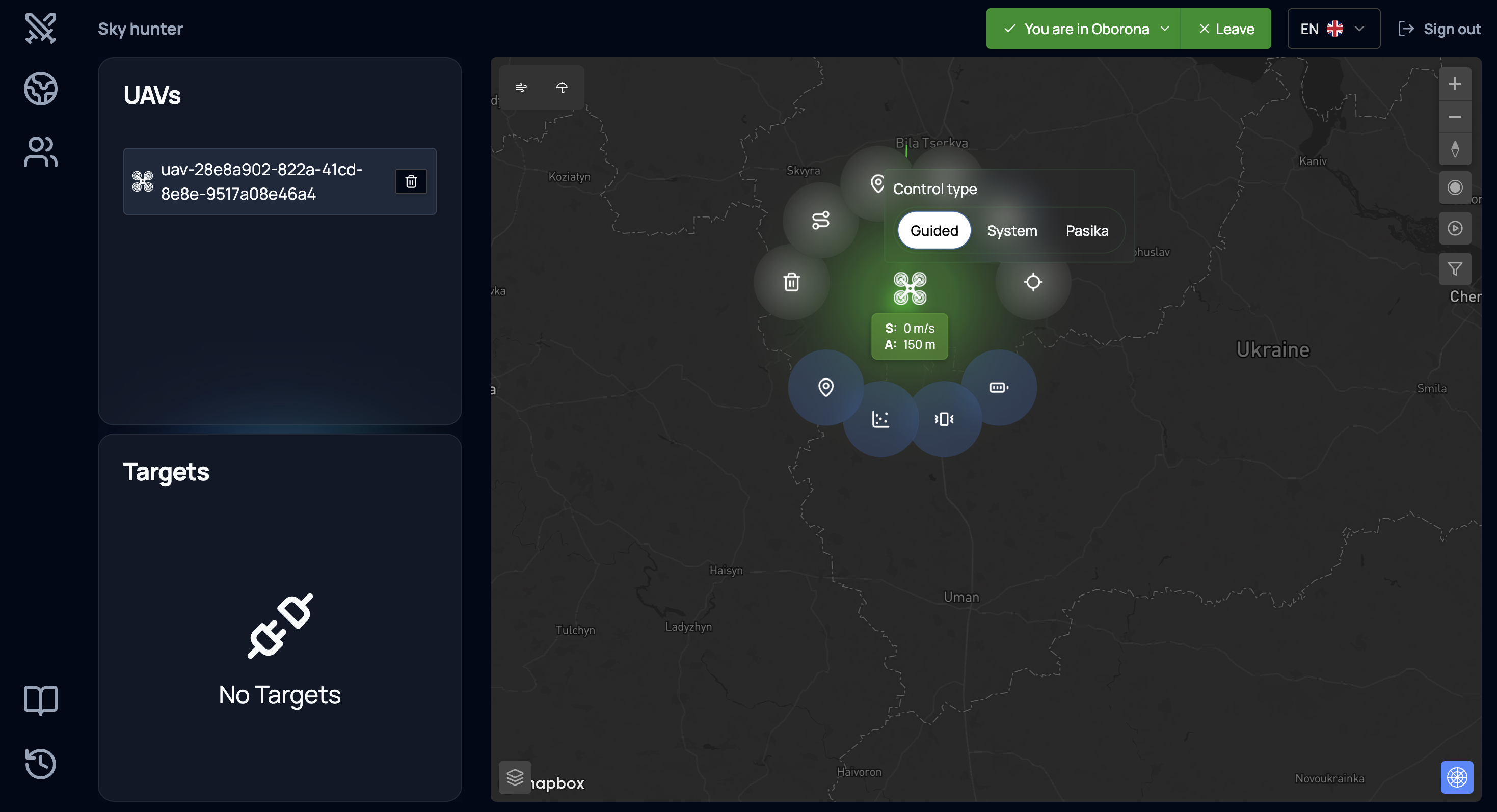
Control type
Задає режим керування дроном:
- Guided - керування за алгоритмами автопілоту;
- System - керування за алгоритмами SkyHunter;
- Pasika - керування за алгоритмами SineLink Pasika.
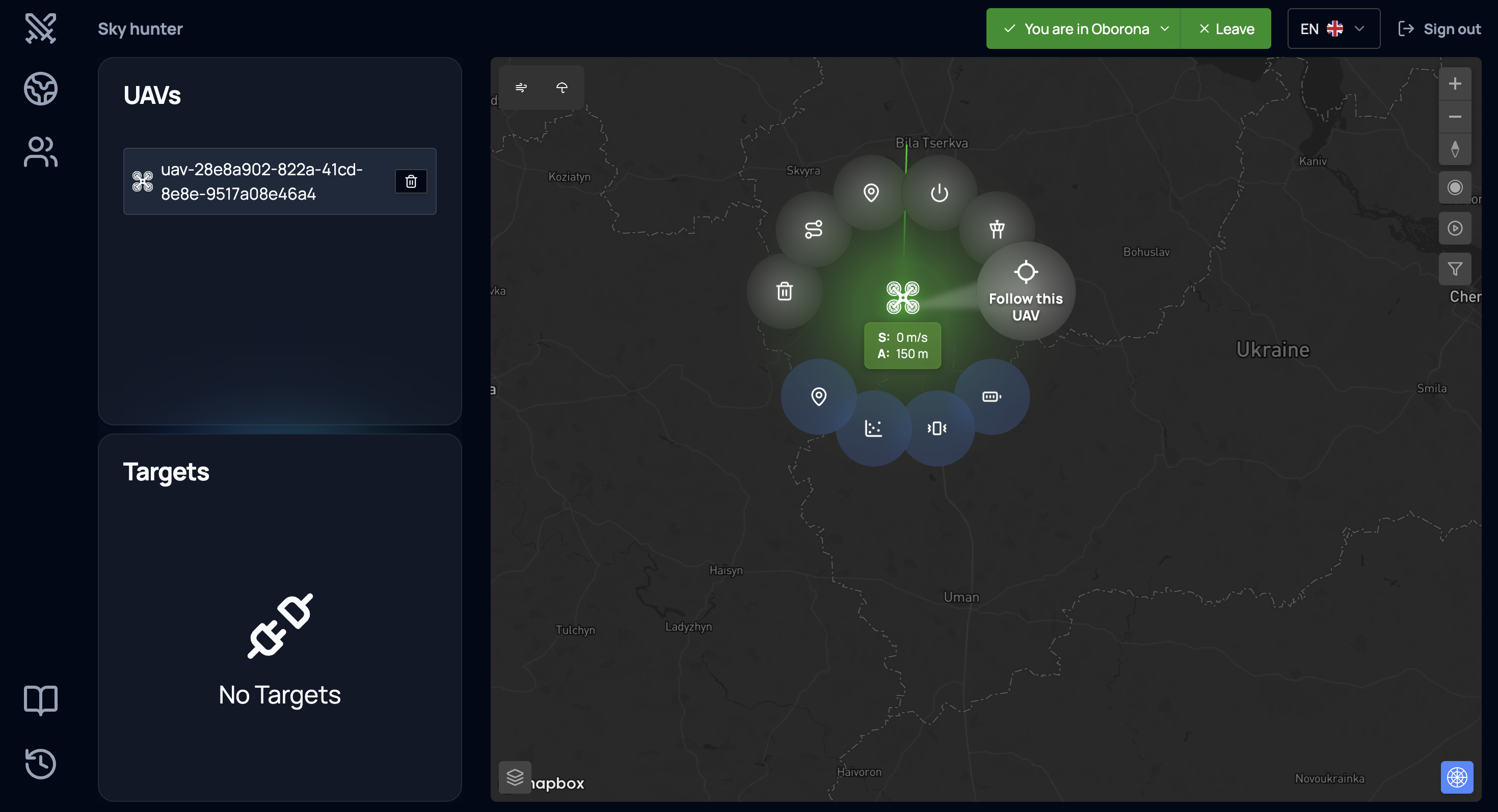
Follow this UAV
Команда використовується для фокусування камери на обраному БПЛА. Після активації інтерфейс автоматично центрує карту на цьому дроні та динамічно супроводжує його переміщення в реальному часі.
Delete
Команда використовується для очищення поточного стану симулятора та скидання активних з’єднань. Вона дозволяє перезапустити роботу симульованого дрону у випадку зависання, втрати синхронізації або інших технічних проблем. Після виконання команди симулятор переходить у початковий стан і готовий до повторного запуску.
3.2.2. Нижня секція – діагностика та технічний стан
Нижнє кільце містить технічні показники, які дозволяють оператору швидко оцінити стан БПЛА та прийняти рішення.
Система використовує кольорові індикатори для оцінки даних:
| Колір | Значення |
|---|---|
| 🟢 Зелений | Система працює в нормальному режимі |
| 🟠 Помаранчевий | Треба звернути увагу |
| 🔴 Червоний | Ситуація критична |
Navigation status
Показує: - активний тип навігації (GPS / Beacons / Radar); - тип фіксації (наприклад, RTK); - кількість супутників; - якість сигналу.
Цей розділ дозволяє оперативно визначити, чи достатньо точні дані позиціонування для виконання завдання.
| Колір | Значення |
|---|---|
| 🟢 Зелений | Навігаційні дані отримуються в повному обсязі в нормальній якості |
| 🟠 Помаранчевий | Низька якість навігаційних даних |
| 🔴 Червоний | Навігаційні дані відсутні (немає GPS, маяків або радарних даних) |
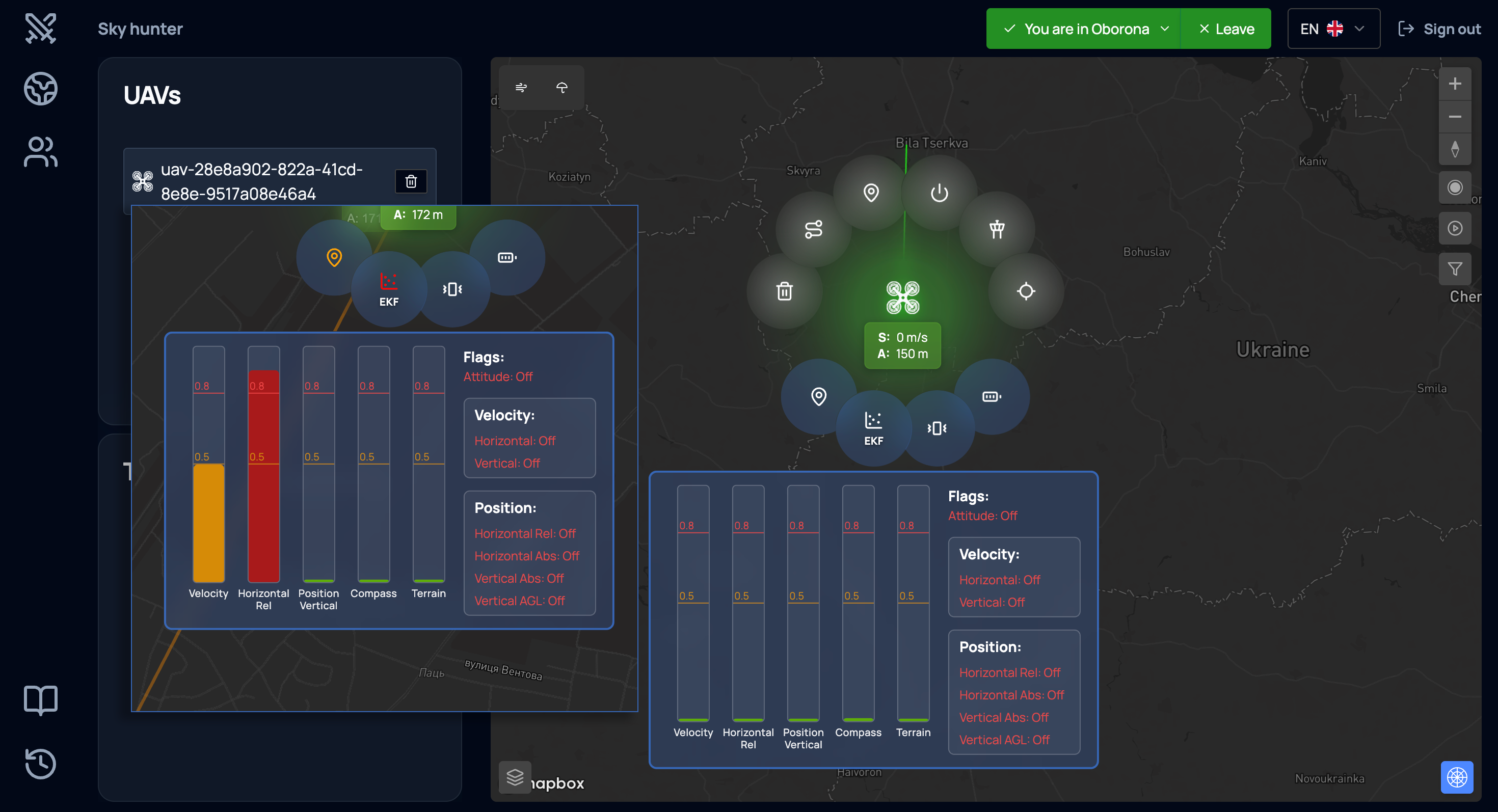
EKF
EKF (Extended Kalman Filter) відображає рівень довіри до сенсорів та стан алгоритмів оцінки положення.
Відображаються показники відносної похибки для датчиків: - швидкості; - горизонтальної позиції; - вертикальної позиції; - магнітного поля (компасу).
Це ключовий інструмент для діагностики проблем з навігацією або сенсорами.
| Колір | Значення |
|---|---|
| 🟢 Зелений | Все працює в нормальному режимі |
| 🟠 Помаранчевий | Значення помилки EKF перевищує 0.5, але не більше 0.8. Це вказує на проблеми з вимірюваними параметрами (вертикальна або горизонтальна позиція, компас). У більшості випадків причиною є неякісні навігаційні дані від зовнішніх джерел, таких як маяки або радар. |
| 🔴 Червоний | Значення помилки EKF 0.8 або більше. У цьому випадку автопілот продовжує працювати на основі інерціальної навігаційної системи, однак існує ризик виникнення помилки та відключення ІНС, що є небажаним режимом роботи. |
Vibration
Відображає рівень вібрацій по осях X, Y, Z, а також лічильники clipping (кількість вимірів в максимальних положеннях акселерометра).
Регулярний контроль цього параметра підвищує надійність польоту.
| Колір | Значення |
|---|---|
| 🟢 Зелений | Значення до 30. Нормальний рівень вібрацій. Робота датчиків та інерціальної системи стабільна. |
| 🟠 Помаранчевий | Значення 30–60. Підвищений рівень вібрацій, який повністю не фільтрується системою, але залишається прийнятним для виконання польоту. |
| 🔴 Червоний | Значення понад 60. Зона підвищеного ризику. Політ можливий, але сильні вібрації створюють шум у датчиках, що може призвести до нестабільної роботи інерціальної навігаційної системи. Причиною можуть бути неправильне налаштування борта або конструкційні вібрації платформи. Політ у таких умовах можливий, але стабільність навігації може бути знижена. |

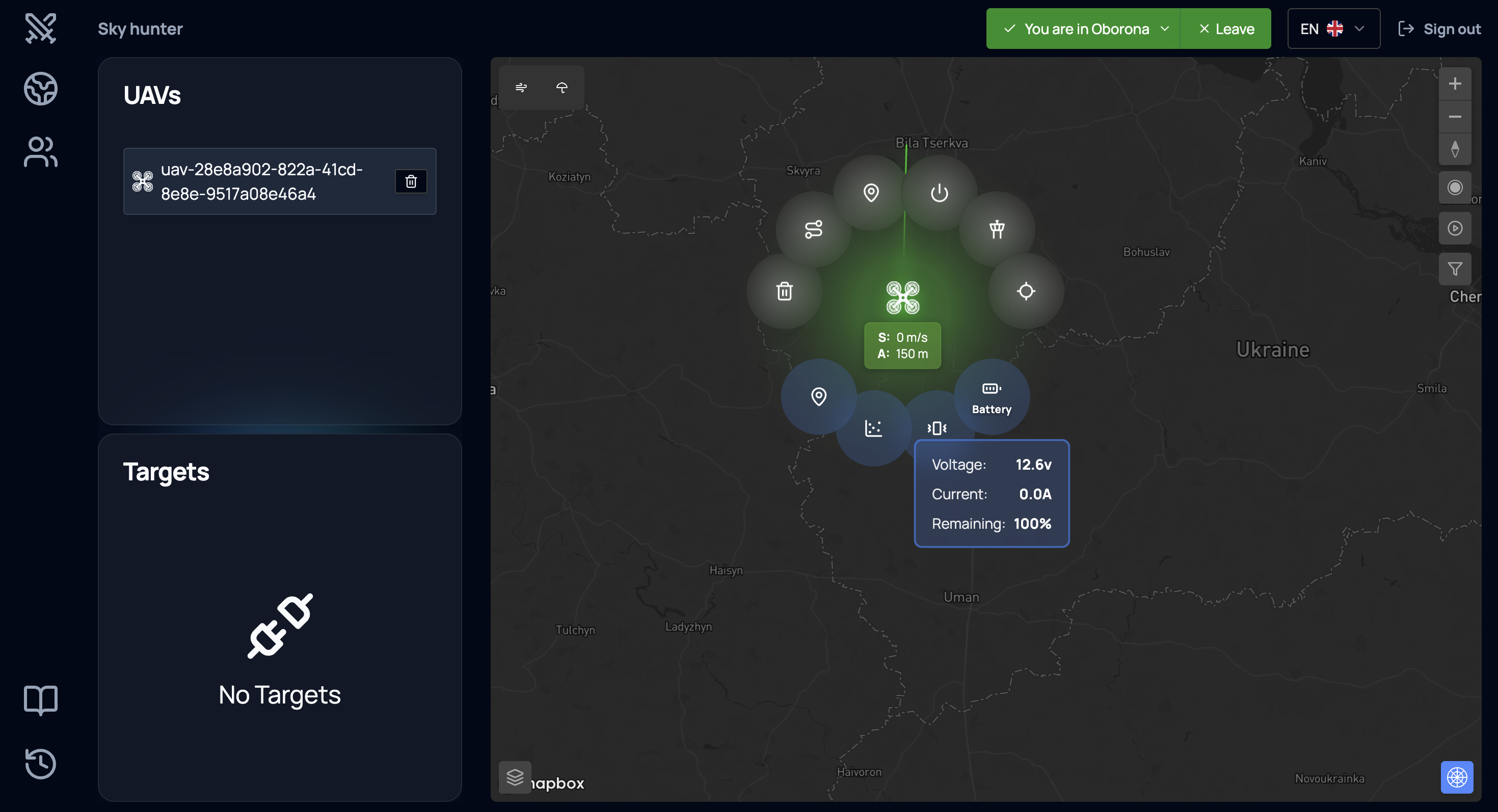
Battery
Показує ключові параметри живлення: - напругу; - споживаний струм; - залишковий відсоток заряду.
Ці дані критично важливі для: - планування часу перехоплення; - розрахунку дистанції повернення; - прийняття рішення про аварійне завершення місії.
| Колір | Значення |
|---|---|
| 🟢 Зелений | Рівень заряду батареї понад 50%. Нормальний режим роботи, обмежень для виконання місії немає. |
| 🟠 Помаранчевий | Рівень заряду батареї 20–50%. Залишок енергії обмежений. Рекомендується планувати завершення місії або повернення БПЛА. |
| 🔴 Червоний | Рівень заряду батареї менше 20%. Критично низький рівень заряду. Необхідно негайно завершити місію та виконати посадку БПЛА. |
3.3. Встановлюємо VPN для Skymap.
Для видачі цілей використовується сервіс Skymap, але для підключення до нього необхідно встановити спецільний VPN сервіс (наприклад, ZeroTier)
Як відбувається підключення:
- Адміністратор VPN-мережі ZeroTier повинен надати вам Network ID (наприклад ab000c1def23g4hi) для підключення.
- Ви повідомляєте цей Network ID (ab000c1def23g4hi) команді SkyHunter.
- Команда SkyHunter підключається до мережі VPN і надає вам свою адресу (наприклад z987654yx3)
- Ви передаєте цю адресу (z987654yx3) адміністратору VPN-мережі ZeroTier, щоб адміністратор авторизував SkyHunter в своїй системі.
- Після авторизації адміністратор VPN-мережі ZeroTier надає вам IP-адресу SkyHunter-а (наприклад 78.193.54.121). Ця IP-адреса знадобиться пізніше в налаштуваннях.
3.4. Робота в Skymap.
Для подальшої роботи переходимо до системи Skymap за раніше отриманими даними доступу. Якщо доступу немає - зверніться до адміністратора Skymap-осередка.

3.4.1. Налаштування бойового розрахунку
- Обираємо точку на мапі, подвійним кліком мишки додаємо розрахунок і копіюємо широту та довготу з маркера.

- Натискаємо на значок шестерні, обираємо пункт меню Адмін панель і переходимо в Розрахунки.

- Натискаємо на Створити розрахунок і заповнюємо всі обовʼязкові поля та зберігаємо. (Тип вказуємо Повітряний, а в координати додаємо ті, що скопіювали з маркеру)

- Далі нам потрібно створити засоби ураження і для цього ми переходимо в Засоби ураження і додаємо новий.

- В полі IP-адреса вказуєму ту, що отримали від адміністратору VPN-мережі ZeroTier -
78.193.54.121, а порт вказуємо той, що отримали при створенні екіпажу в SkyHunter -1142

Для перевірки інтеграції призначте трек на новий розрахунок. (Військові знають, як це робиться.)
За замовчанням розрахунок неактивний. Для активації увімкніть режим «На чергуванні».


3.4.2. Створення цілей та прив'язка до розрахунку
Створення цілей у SkyHunter через сервіс Skymap використовується для моделювання повітряної обстановки, навчання операторів або тестування алгоритмів перехоплення.
У цьому режимі можна створювати як свої, так і ворожі об’єкти з подальшою прив’язкою до конкретного розрахунку (екіпажу).
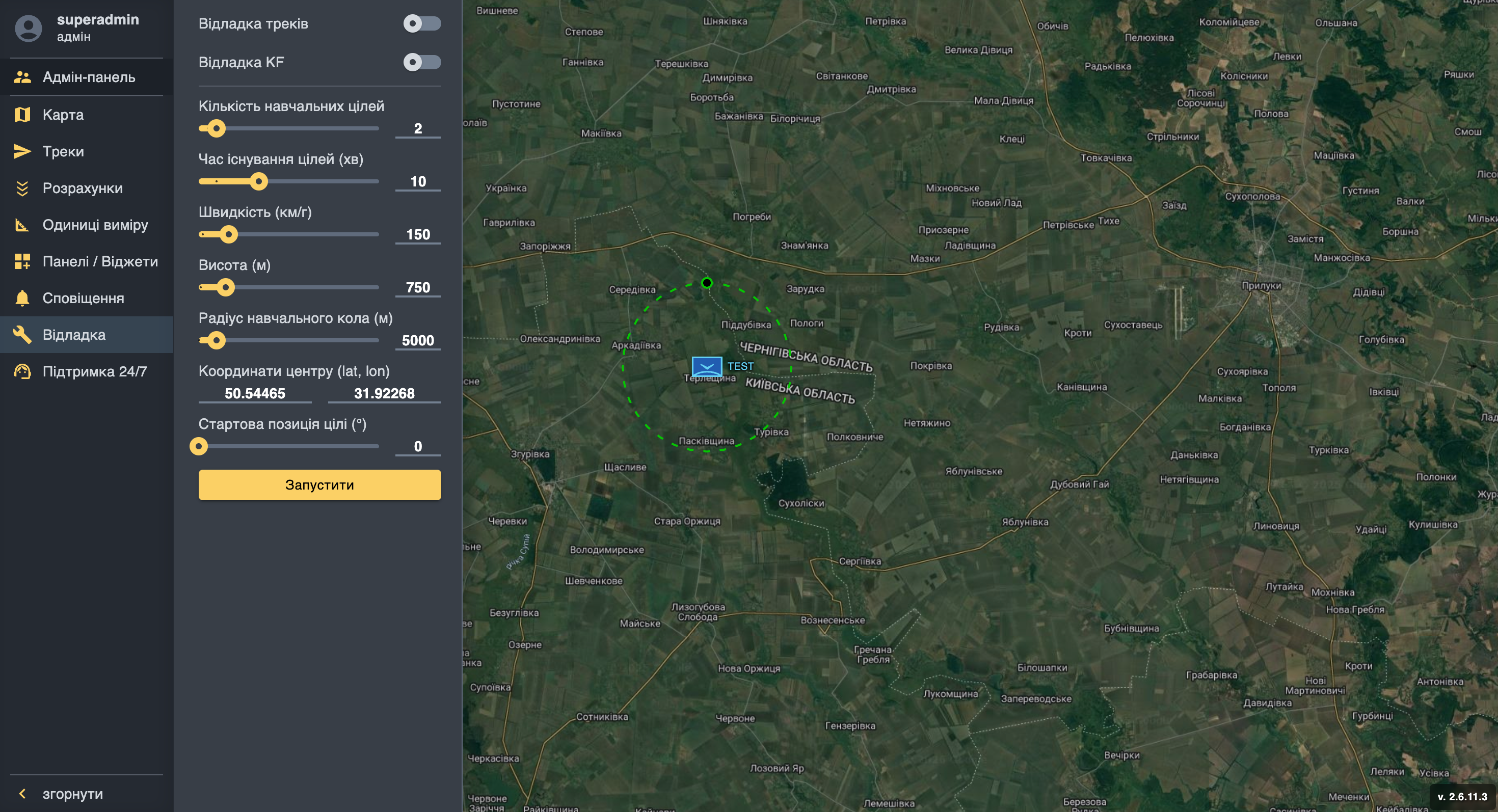
- Натискаємо на значок шестерні, обираємо пункт меню Відладка.
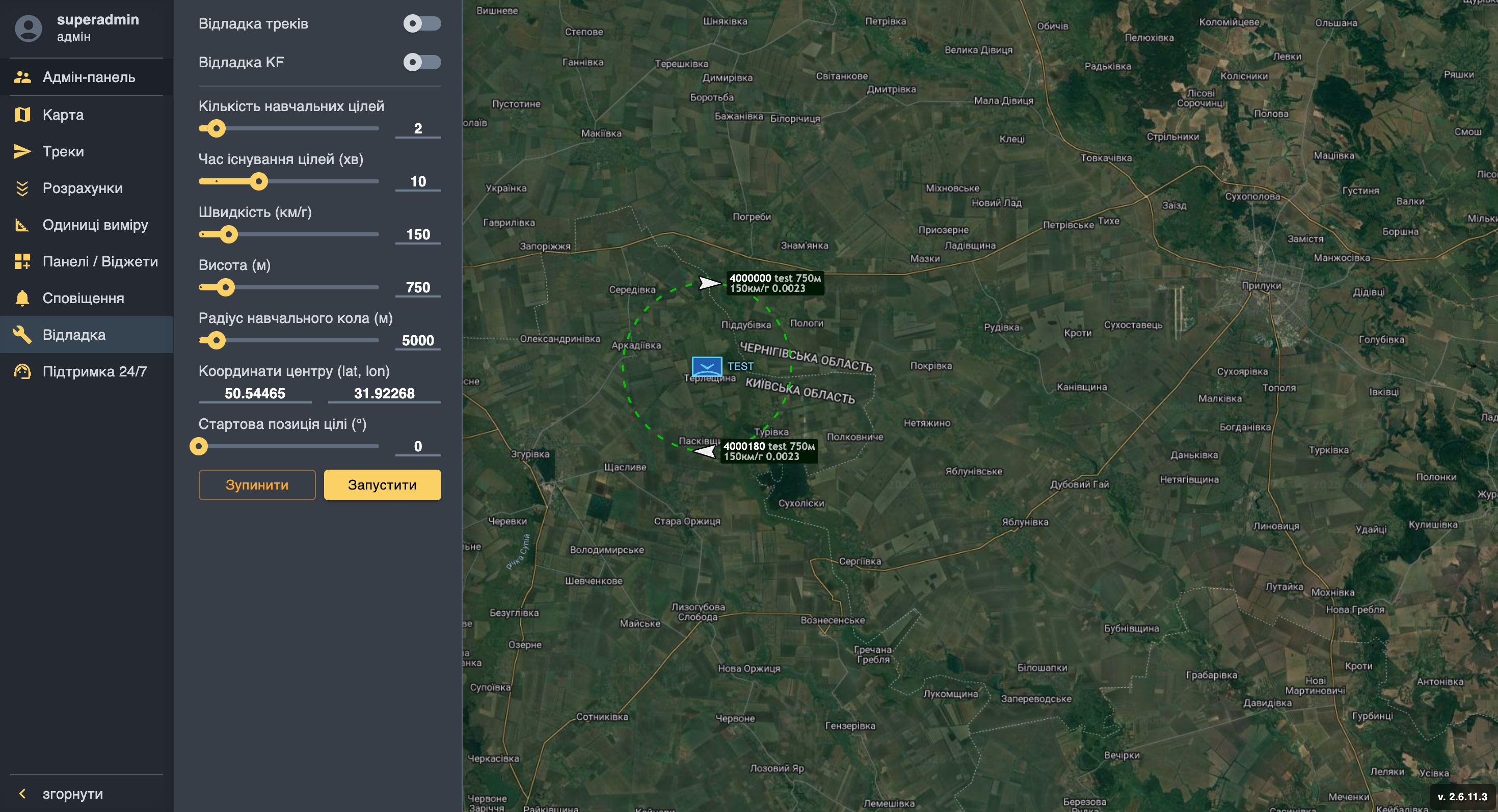
У відкритому вікні налаштувань можна залишити параметри за замовчуванням. Необхідно змінити лише координати (вставляємо ті, що були скопійовані раніше з маркеру на мапі) та вказати кількість навчальних цілей. Після цього натискаємо Запустити.
Система створить повітряні об’єкти у вказаній точці та додасть їх до поточної сесії Skymap.
- Обираємо літак, який буде визначений як свій. Для цього клікаємо на відповідний об’єкт на мапі та натискаємо кнопку Свій.
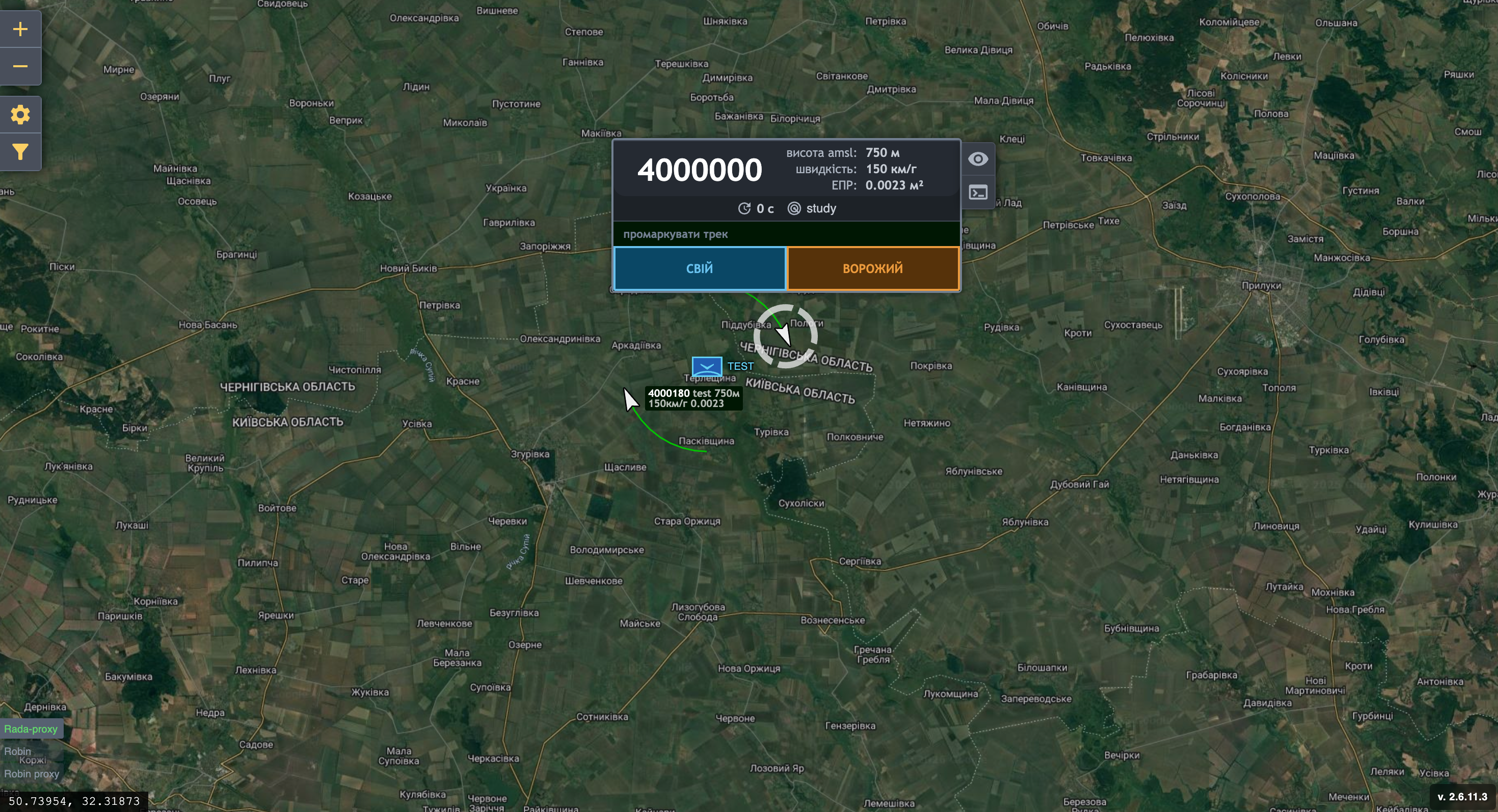
На наступному кроці привʼязуємо ціль до нашого розрахунку ("Test").

- Тепер треба визначити ворожий літак. Для цього клікаємо на обраний літак і натискаємо Ворожий.

На наступному кроці привʼязуємо ціль до нашого розрахунку ("Test").

- За необхідності можна створювати та прив’язувати додаткові цілі. Це дозволяє моделювати складні сценарії.
3.5. Повертаємося в інтерфейс симулятора SkyHunter
Як тільки цілі прив'язані до розрахунку в Skymap, вони автоматично синхронізуються з інтерфейсом SkyHunter.
Передача даних відбувається в реальному часі, тому новостворені або перекласифіковані об’єкти повинні з’явитися на мапі SkyHunter без додаткових дій з боку оператора.
Після синхронізації ціль: - відображається на мапі; - отримує відповідний статус (свій/ворожий); - стає доступною для подальшої прив’язки до БПЛА; - може використовуватися алгоритмами супроводу та перехоплення.
Прив'язуємо БПЛА до цілі.
Після появи ворожої цілі на мапі наступним кроком є закріплення за нею дрона-перехоплювача. Якщо в зоні присутній БПЛА, який: - активний; - не виконує іншу місію; - не прив’язаний до жодної цілі, система SkyHunter може автоматично запропонувати закріпити ціль за доступним БПЛА. Такий механізм спрощує роботу оператора та прискорює реакцію на загрозу.
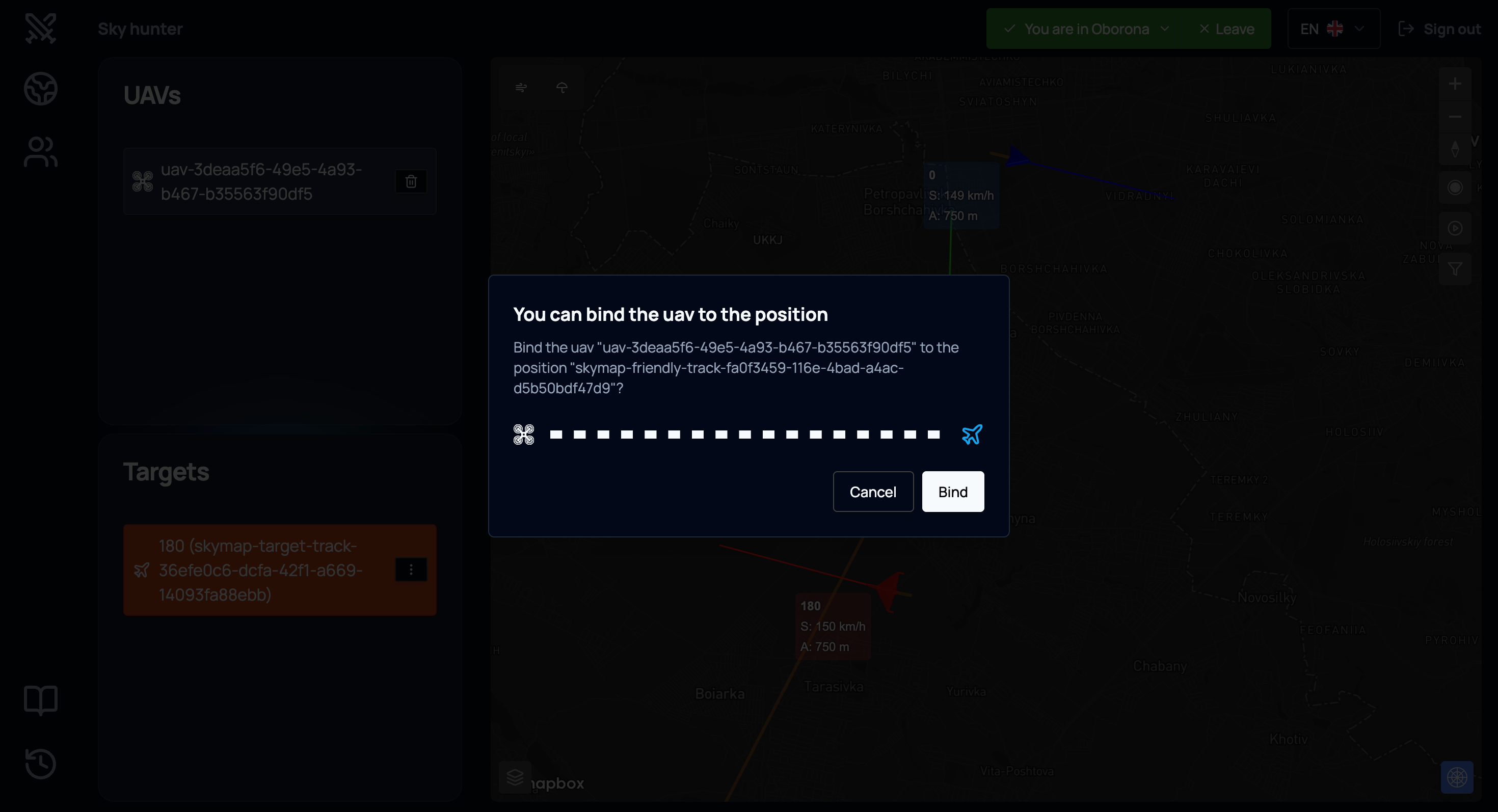
Також можно закріпити ціль за БПЛА в ручному режимі. Для цього потрібно клікнути на ворожому літаку та натиснути на іконку маленького літака, яка знаходиться між нашим БПЛА та ворожим літаком.
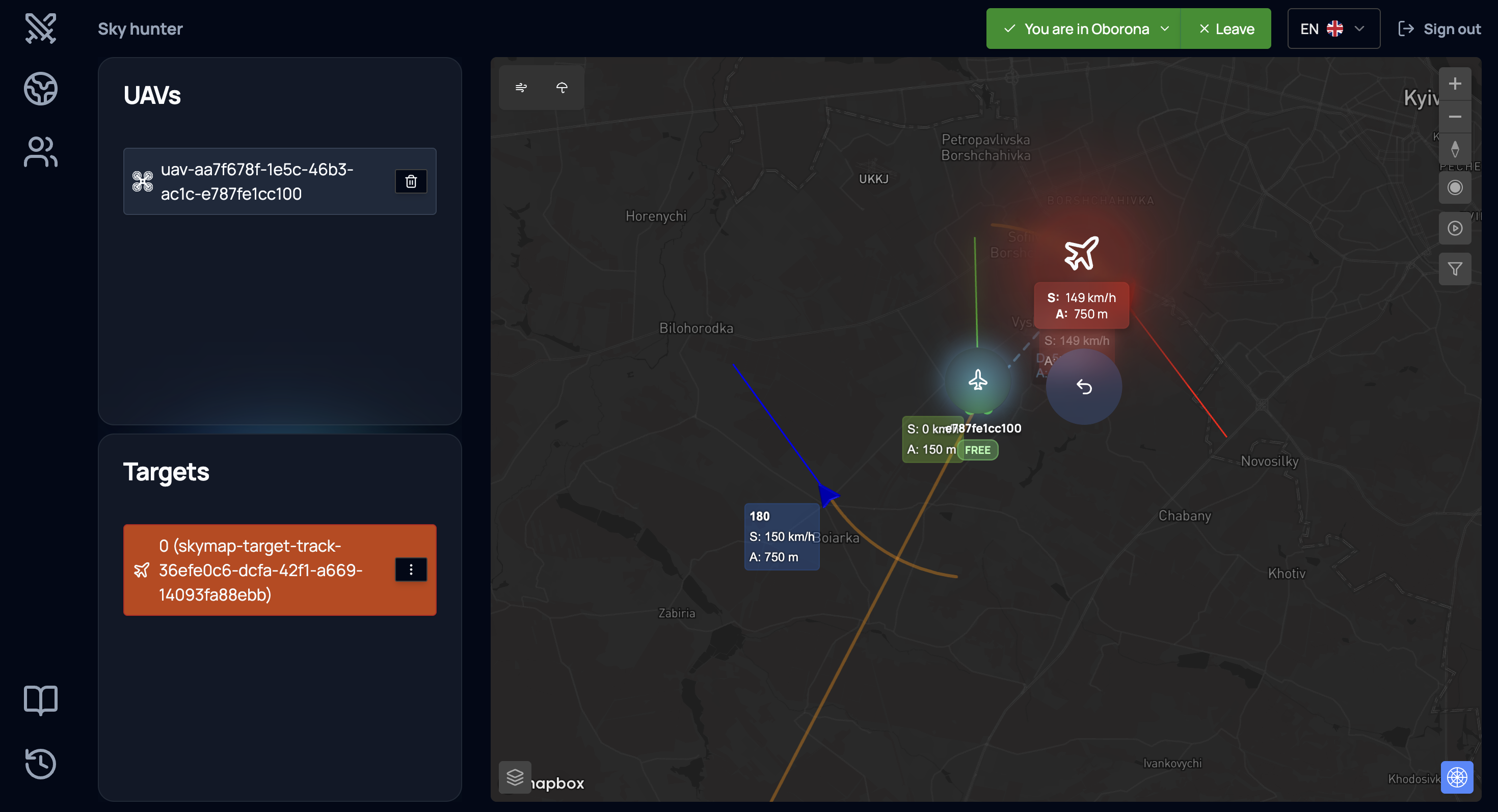
Після успішної прив’язки: - між БПЛА та ціллю з’являється пунктирна лінія; - система фіксує зв’язок у журналі екіпажу; - у верхній частині радіального меню БПЛА з’являється новий пункт — Unbind target (Відʼєднати від цілі).
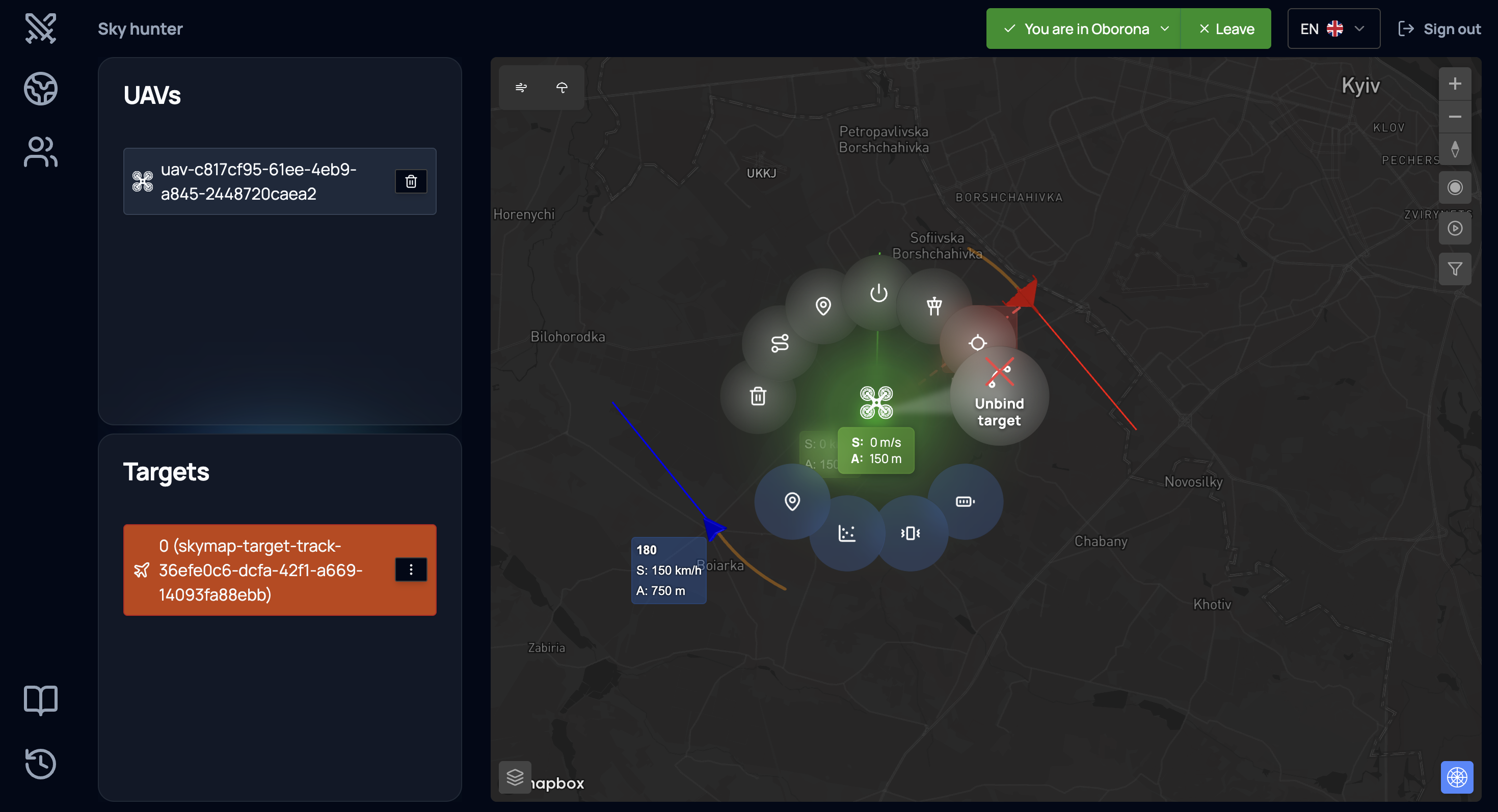
Команда Unbind target дозволяє: - скасувати перехоплення; - змінити ціль; - звільнити БПЛА для нового завдання.
Запуск місії.
Після прив’язки цілі можна розпочинати місію перехоплення.
Для запуску: 1. Клікаємо на БПЛА. 2. У радіальному меню натискаємо Arm (Запустити).
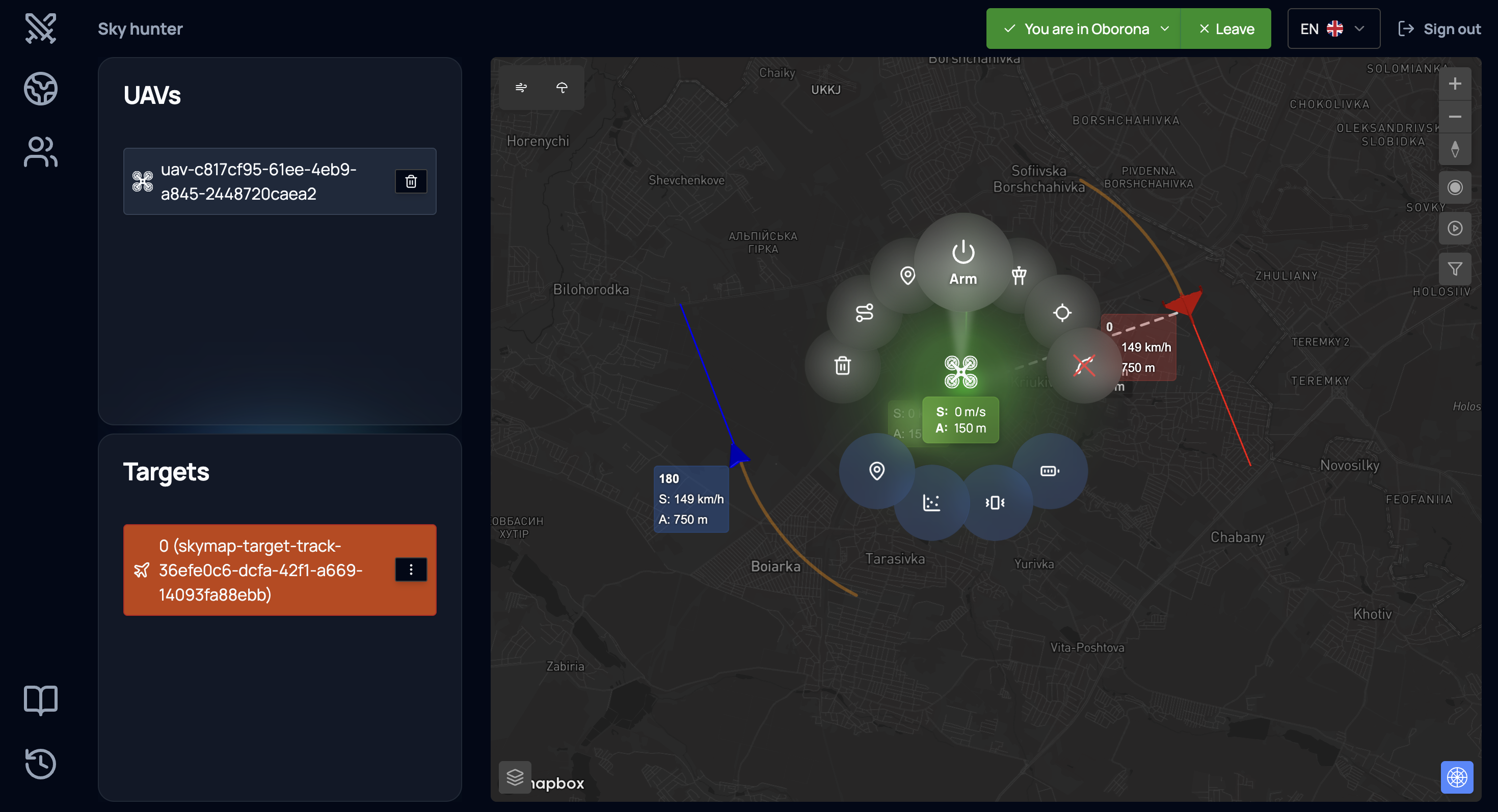
Після активації: - дрон переходить у стан озброєння; - запускаються двигуни; - починається автоматичний набір висоти; - активується алгоритм супроводу цілі.
Дрон-перехоплювач переходить у автоматичний режим та починає рух у напрямку цілі відповідно до обраного типу навігації та алгоритму перехоплення.
У процесі польоту система: - коригує траєкторію в реальному часі; - враховує швидкість та напрямок руху цілі; - відображає актуальну телеметрію; - підтримує можливість ручного втручання оператора за необхідності.
3.6. Телеметрія - Mission Planner
Для передачі телеметрії нам необхідно зробити наступні кроки: 1. Підключаємось до MissionPlaner.

- Переходимо в Setup/Advanced, клікаємо на Mavlink Mirror і прописуємо необхідні параметри (IP-адресу
78.193.54.121використовуємо ту, що отримали на початку. Обов'язково ставимо чекбокс Write).

- Натискаємо на GO. (Якщо не підключається, то у вас немає підключення до ВПН або вказані некоректні дані (Хост або порт)).
