Test
Робота БПЛА без GPS та використання інерціальної навігації.
Призначення.
Інерціальна навігаційна система (ІНС) для БПЛА – це повністю автономна система, яка визначає місцезнаходження, швидкість та орієнтацію дрона без використання зовнішніх сигналів, таких як GPS, радіомаяки чи наземні станції.
Як це працює Система базується на законах інерції та складається з двох основних типів датчиків, які зазвичай об'єднані в блок IMU (Inertial Measurement Unit): - Акселерометри: вимірюють лінійне прискорення по трьох осях. - Гіроскопи: вимірюють кутову швидкість (обертання навколо осей). Обчислювач системи постійно інтегрує ці дані: знаючи стартову точку та вимірюючи кожне прискорення й поворот, він «вираховує» поточний шлях об'єкта.
1. Процедура встановлення стартової точки.
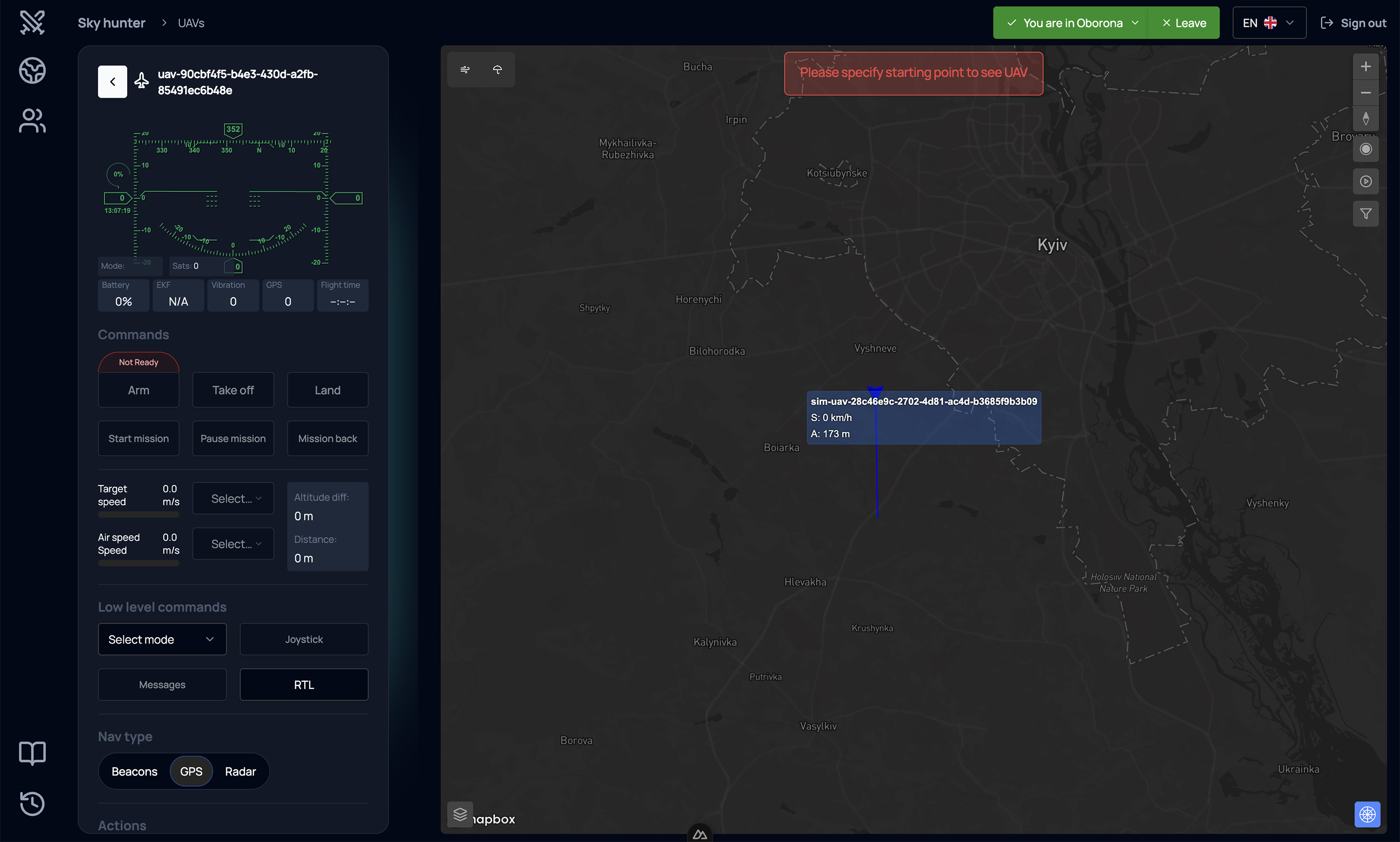
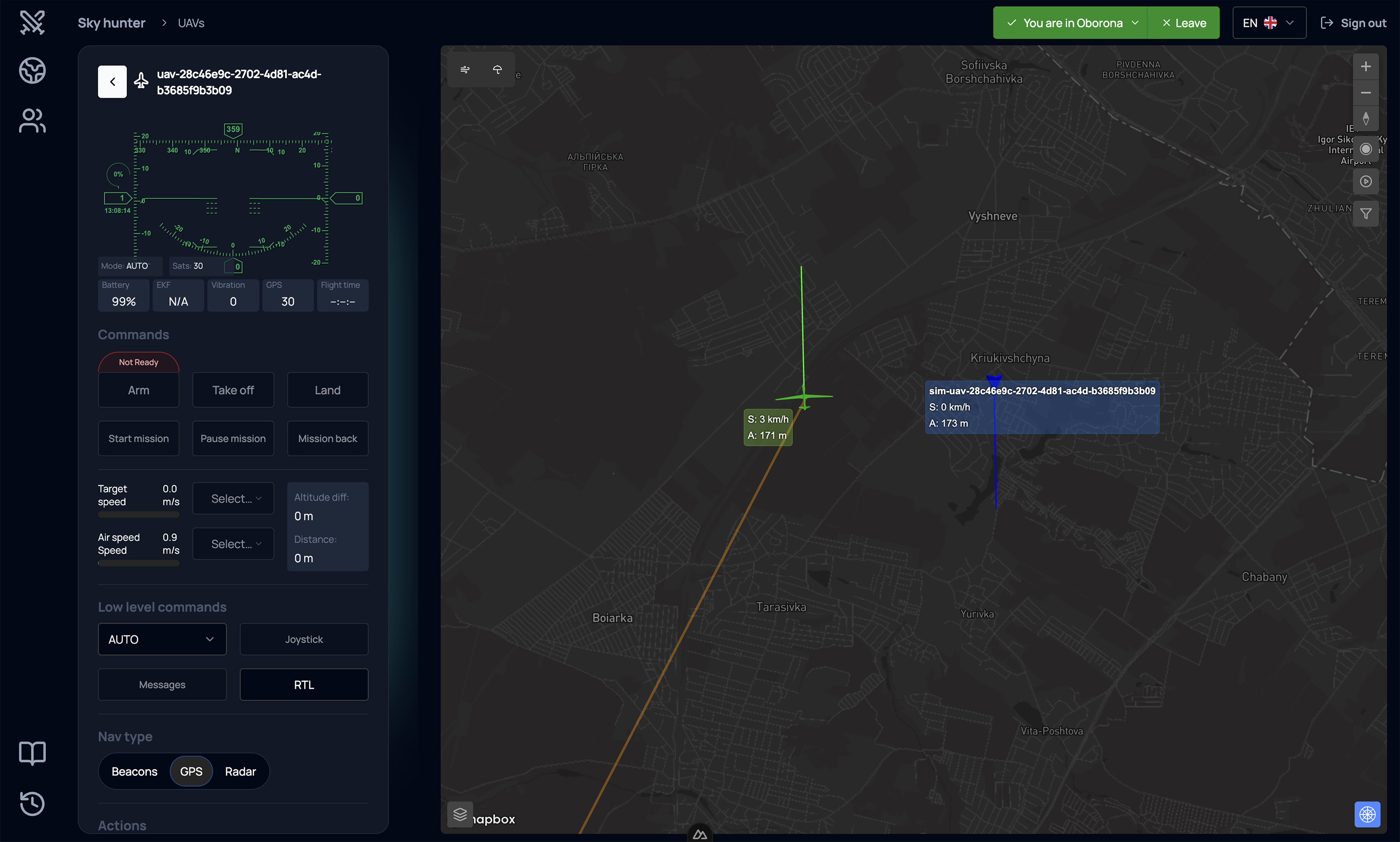
Для коректної роботи ІНС оператор повинен задати стартову точку БПЛА вручну. Якщо стартову точку не встановлено, система відображає повідомлення:
Please specify starting point to see UAV
Без виконання цієї операції запуск борта неможливий.
Встановлення стартової точки дозволяє системі: - визначити початкову позицію БПЛА; - активувати інерціальну навігацію; - відобразити борт на мапі системи SkyHunter.
1. Відкрийте мапу в інтерфейсі SkyHunter і клікніть в точці передбачуваного запуску БПЛА.
2. У контекстному меню виберіть команду Set starting point.
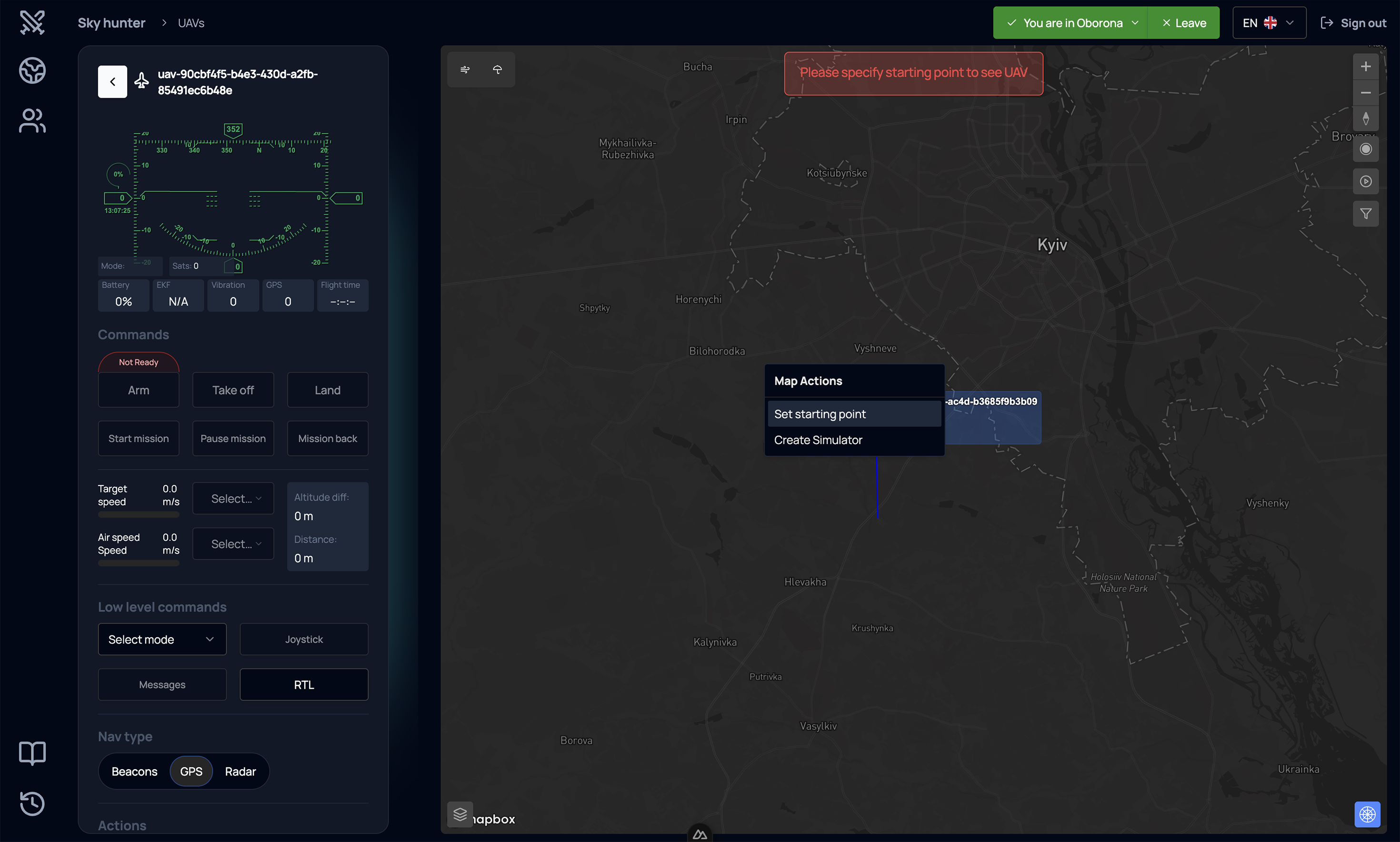
3. Система автоматично:
- встановить координати точки;
- визначить висоту запуску.
Якщо активна карта висот, висота визначається автоматично. Якщо карта висот неактивна, висоту необхідно встановити вручну.
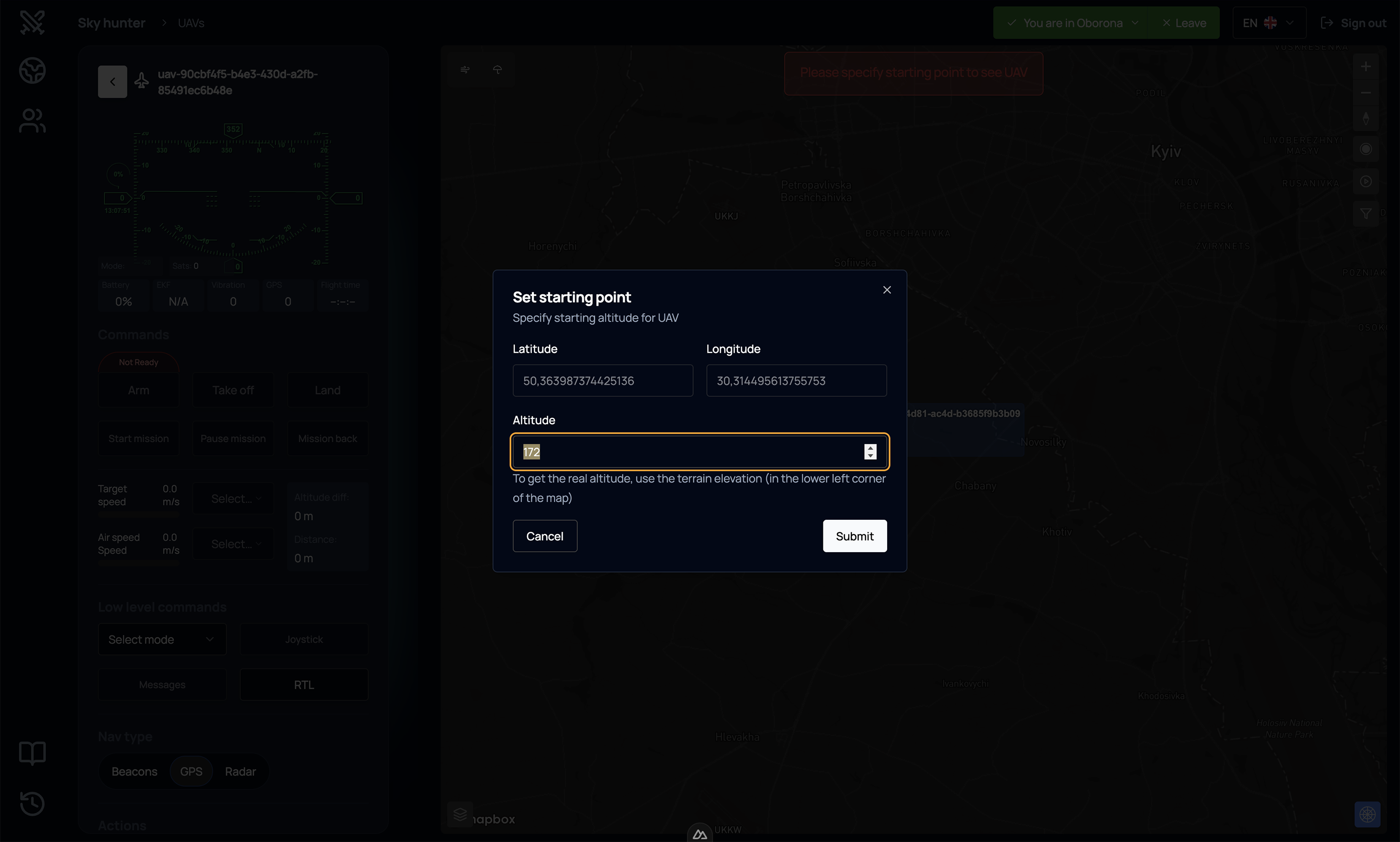
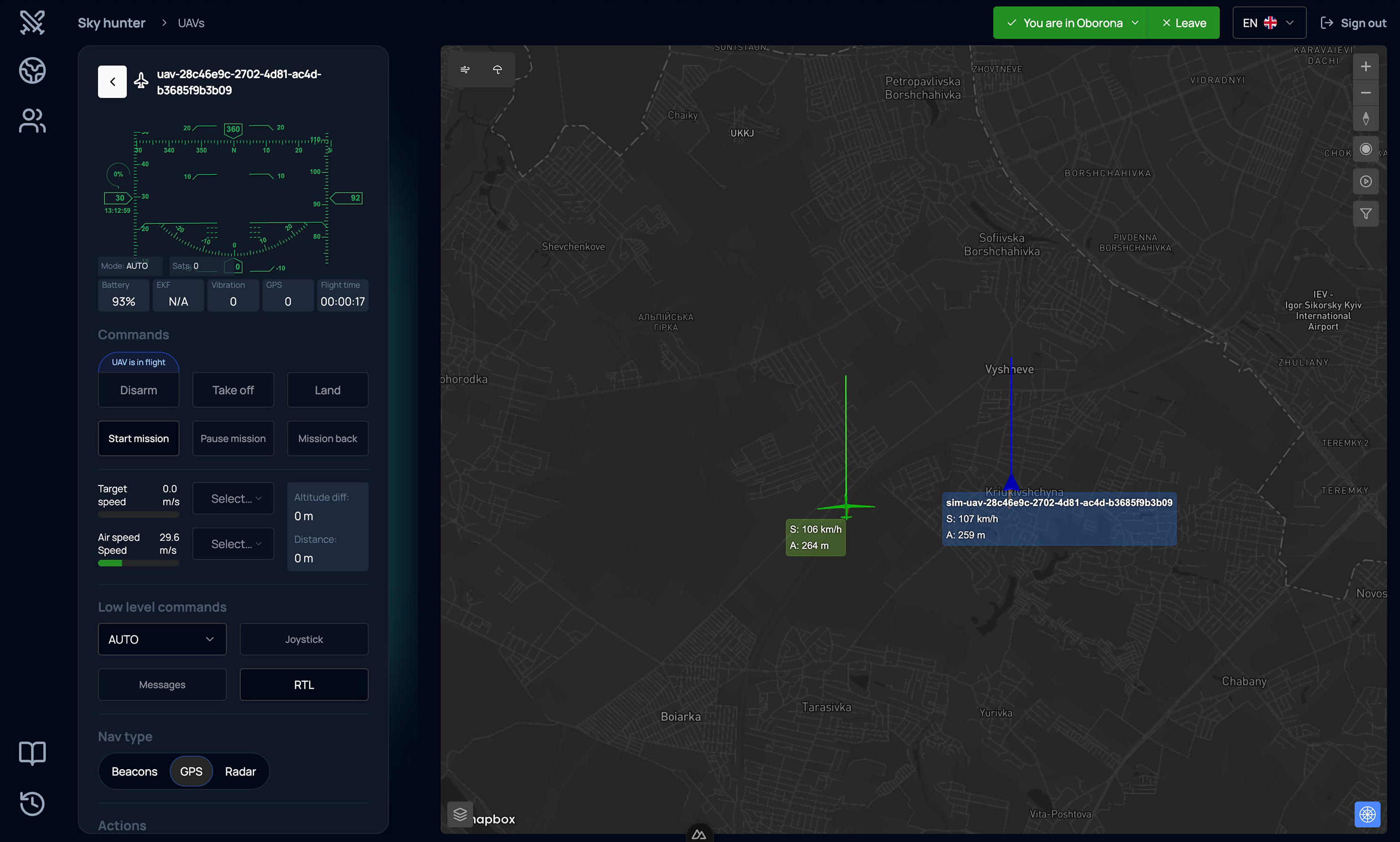
4. Після підтвердження БПЛА буде розміщено у заданій точці на мапі.
2. Корекція позиції БПЛА.
Основним мінусом роботи Інерціальної навігаційної системи є накопичення похибки (дрейф). З часом маленькі неточності датчиків підсумовуються, і реальна позиція дрона починає відрізнятися від розрахункової. Тому в сучасних БПЛА ІНС зазвичай працює в парі з іншими системами для періодичного корегування координат.
Можливі джерела корекції: - радарні дані; - візуальна орієнтація по карті.
1. Зміна положення БПЛА згідно з даними радару.
Якщо ми отримали від радару дані реального положення БПЛА і вони відрізняються від даних ІНС, то ми можемо скоригувати поточне положення.
Необхідно клікнути в місці реального положення (отримали від радару) та обрати в контекстному меню пункт "I'm here".
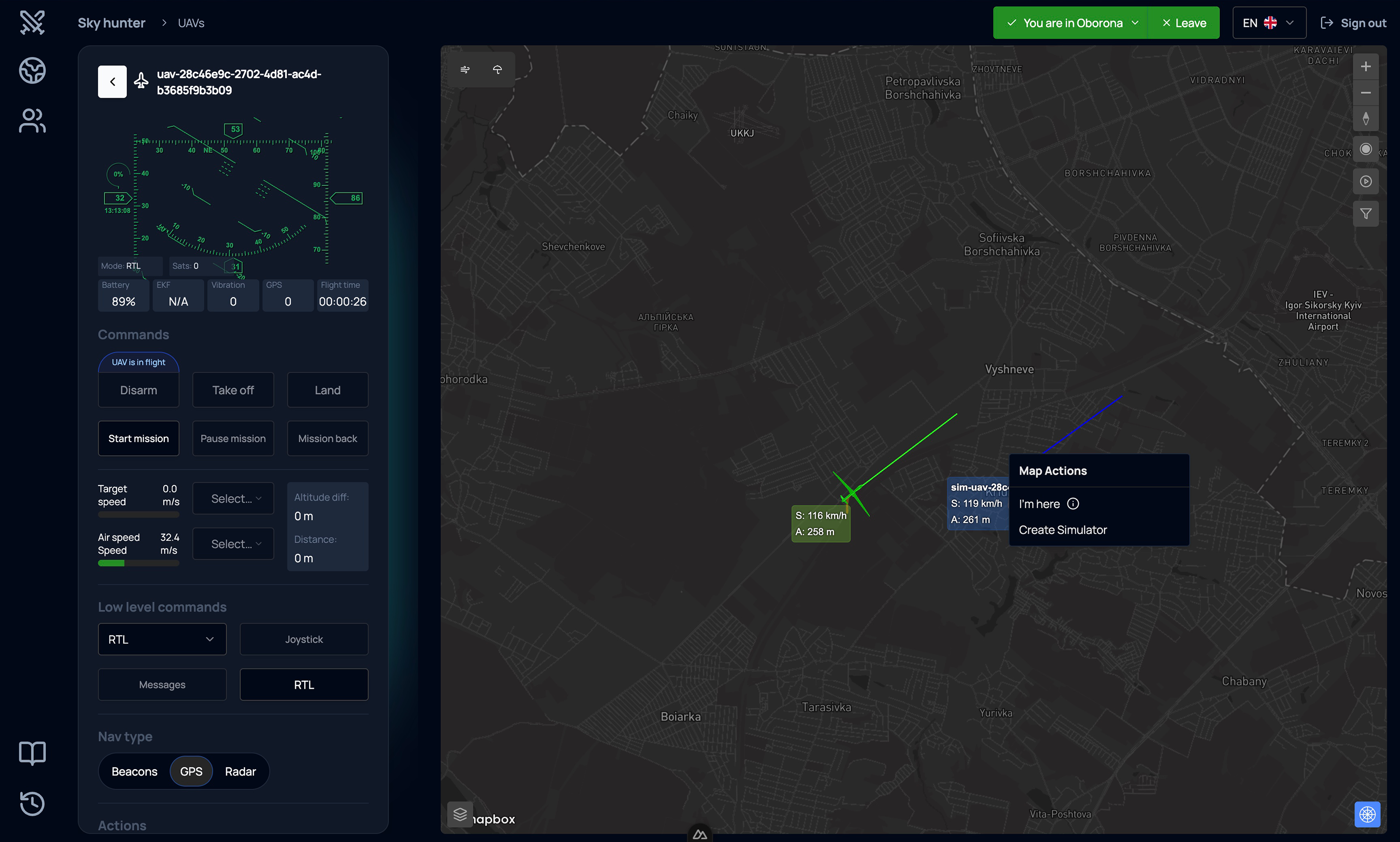
Після цього система автоматично скоригує положення БПЛА згідно з новими координатами.
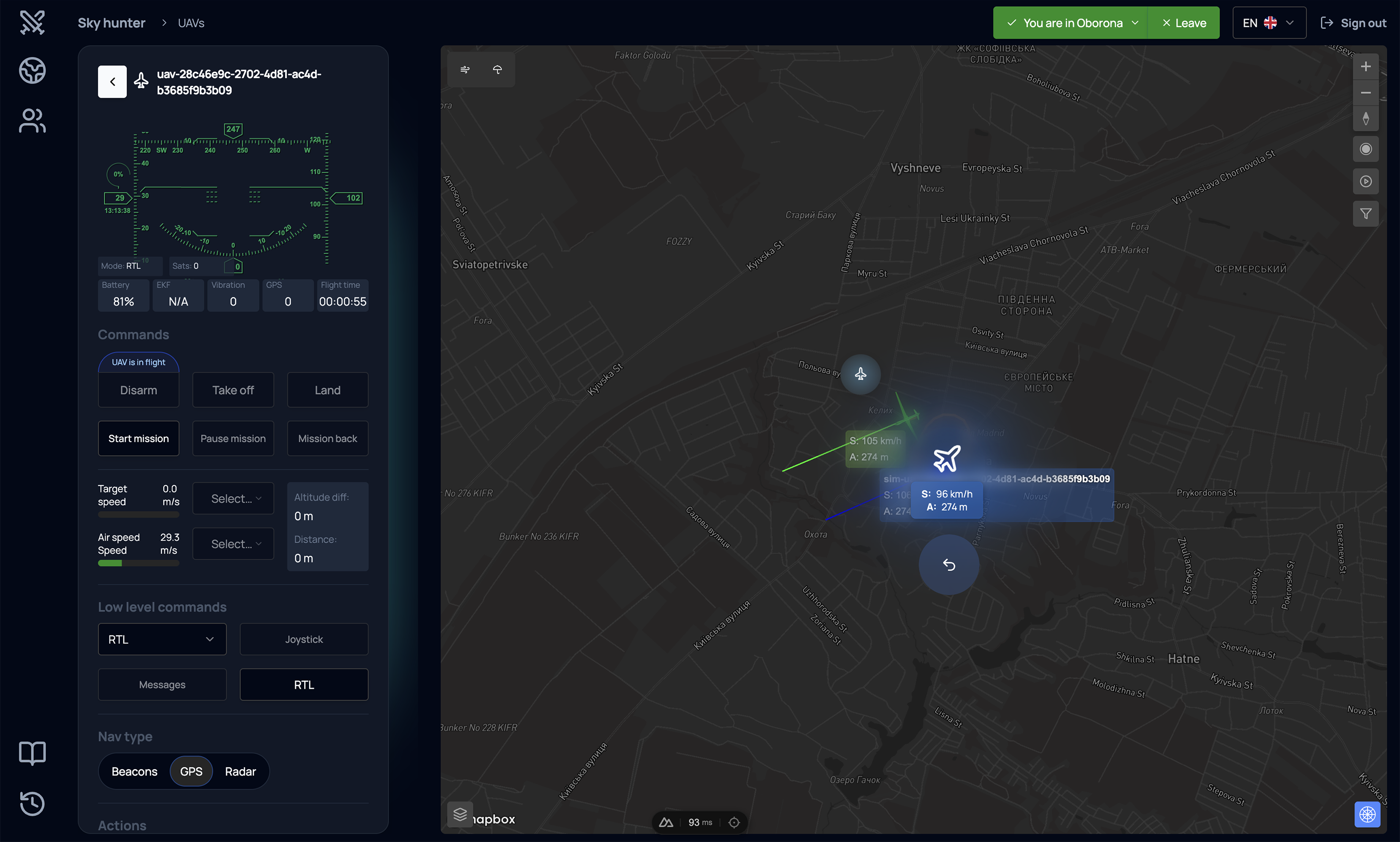
2. Коригування положення БПЛА згідно радарного треку.
Прив’язка радарного треку дозволяє: - підвищити точність позиціонування; - компенсувати дрейф інерціальної системи.
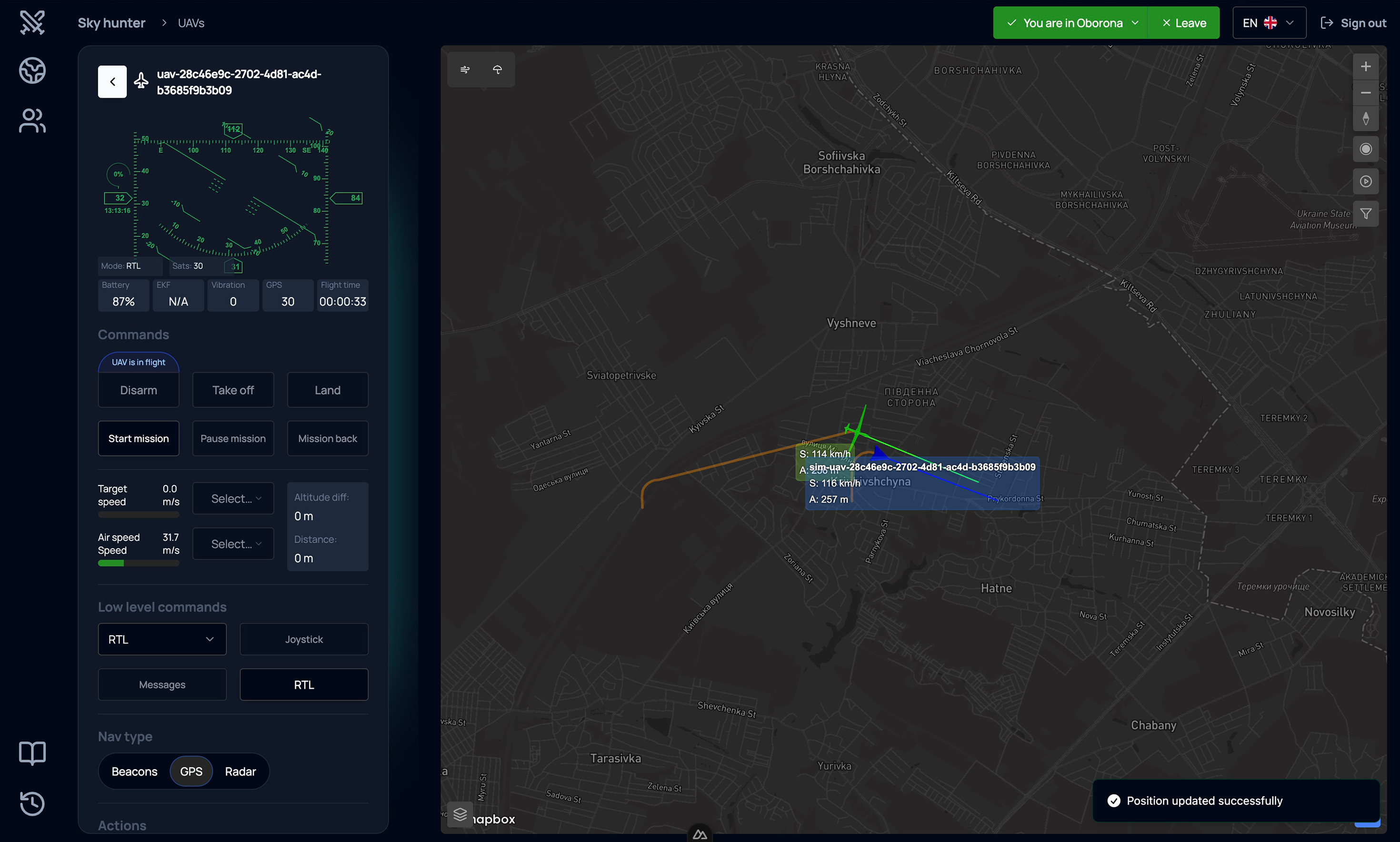
Для привʼязки БПЛА (позначений зеленим) до радарного треку необхідно клікнути на синьому літаку (наша позиція згідно даних радару) та натиснути на іконку маленького літака, яка знаходиться між зеленим та синім літаками.
Якщо все пройшло успішно і трек закріплено за БПЛА, то ви побачите повідомлення "Target bind to UAV successfully" і іконка нашого БПЛА зміниться.
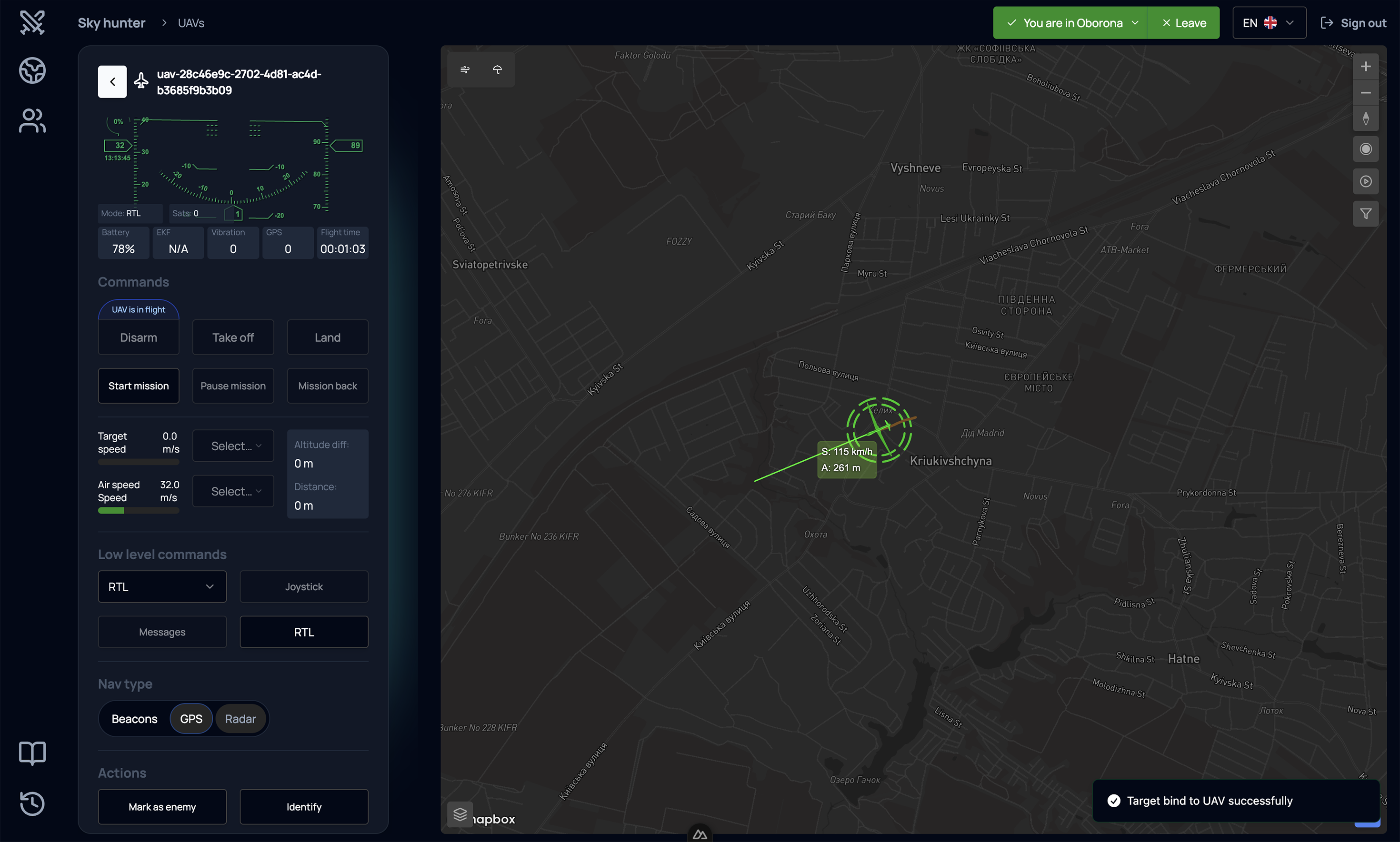
Після цього вже використовується позиція радарного треку як більш точна.
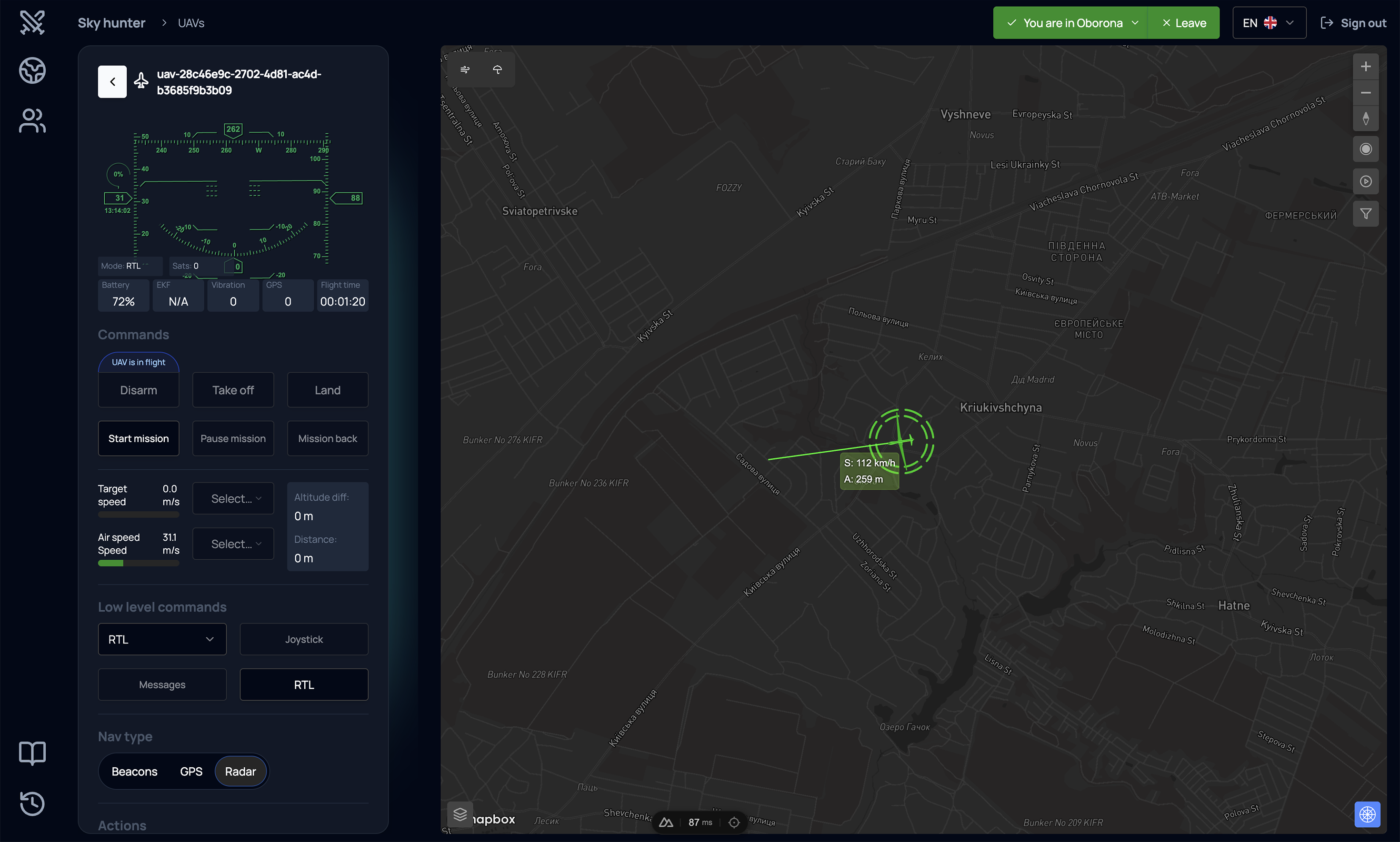
ВАЖЛИВО! Інерціальна система при цьому не переналаштовується, тому що часте втручання у роботу INS може призвести до нестабільної роботи системи в майбутньому. Якщо в даний момент наш літак виконував місію і летів до цілі, то він не змінить одразу своє положення згідно з треком радару: ми розраховуємо похибку і вже враховуємо її до моменту досягення цілі. Зверніть увагу, щоб відбувалося автоматичне уточнення координат за закріпленим радарним треком, необхідно обрати режим навігації Radar.
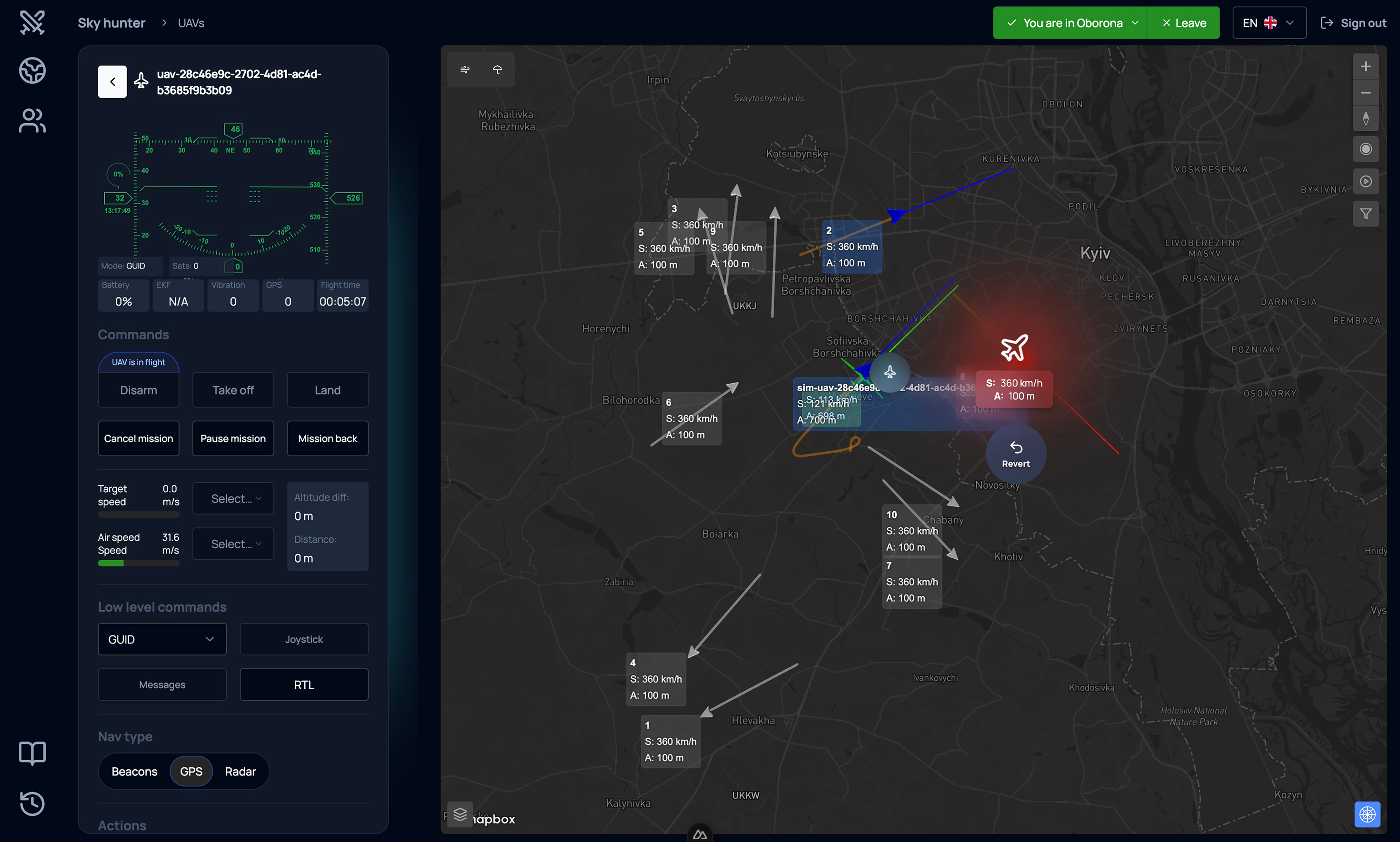
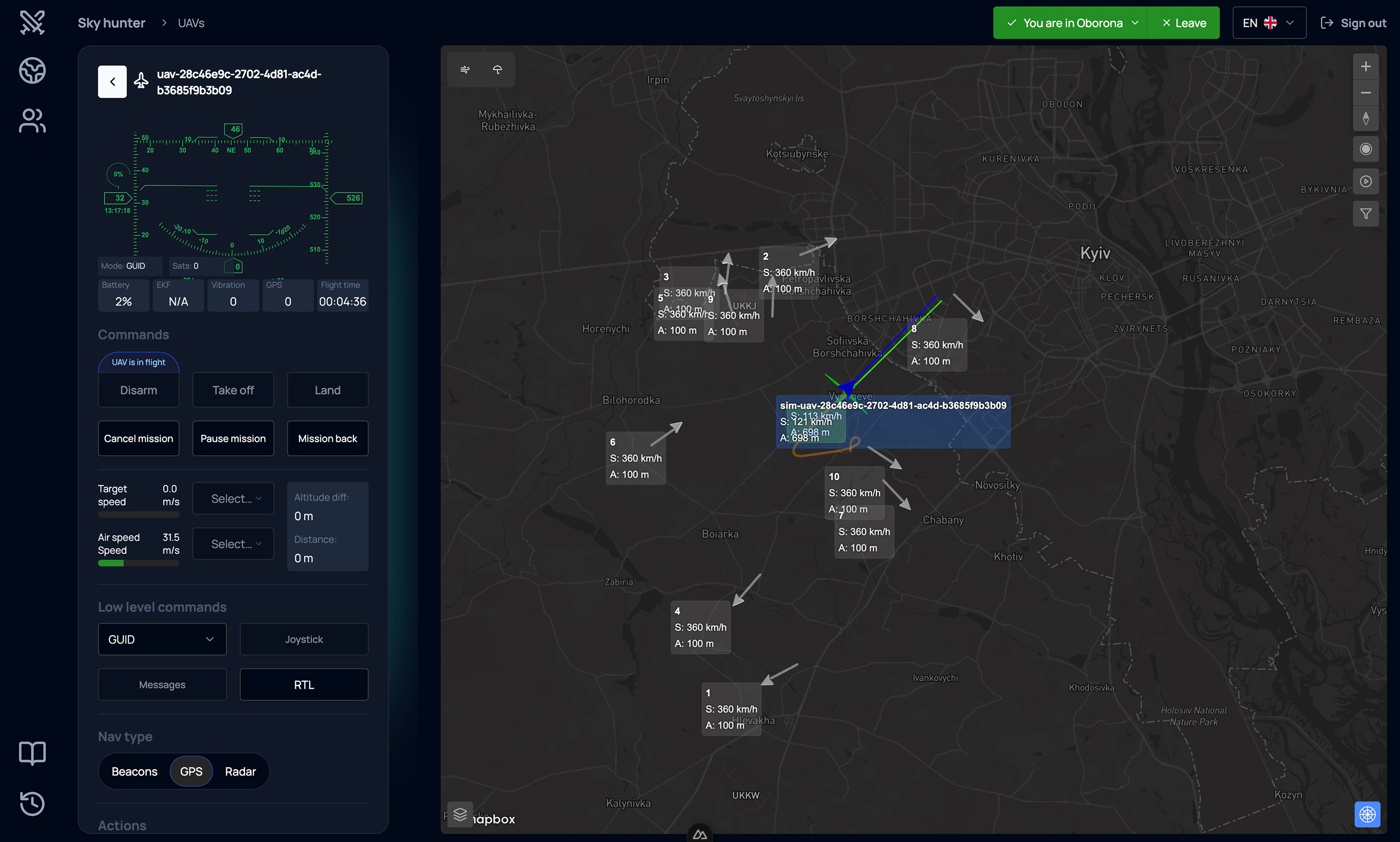
3. Інтеграція за радарами та радарні треки.
Після інтеграції з радарною системою у SkyHunter з’являються радарні треки. Вони відображаються на карті у вигляді світлих стрілок.
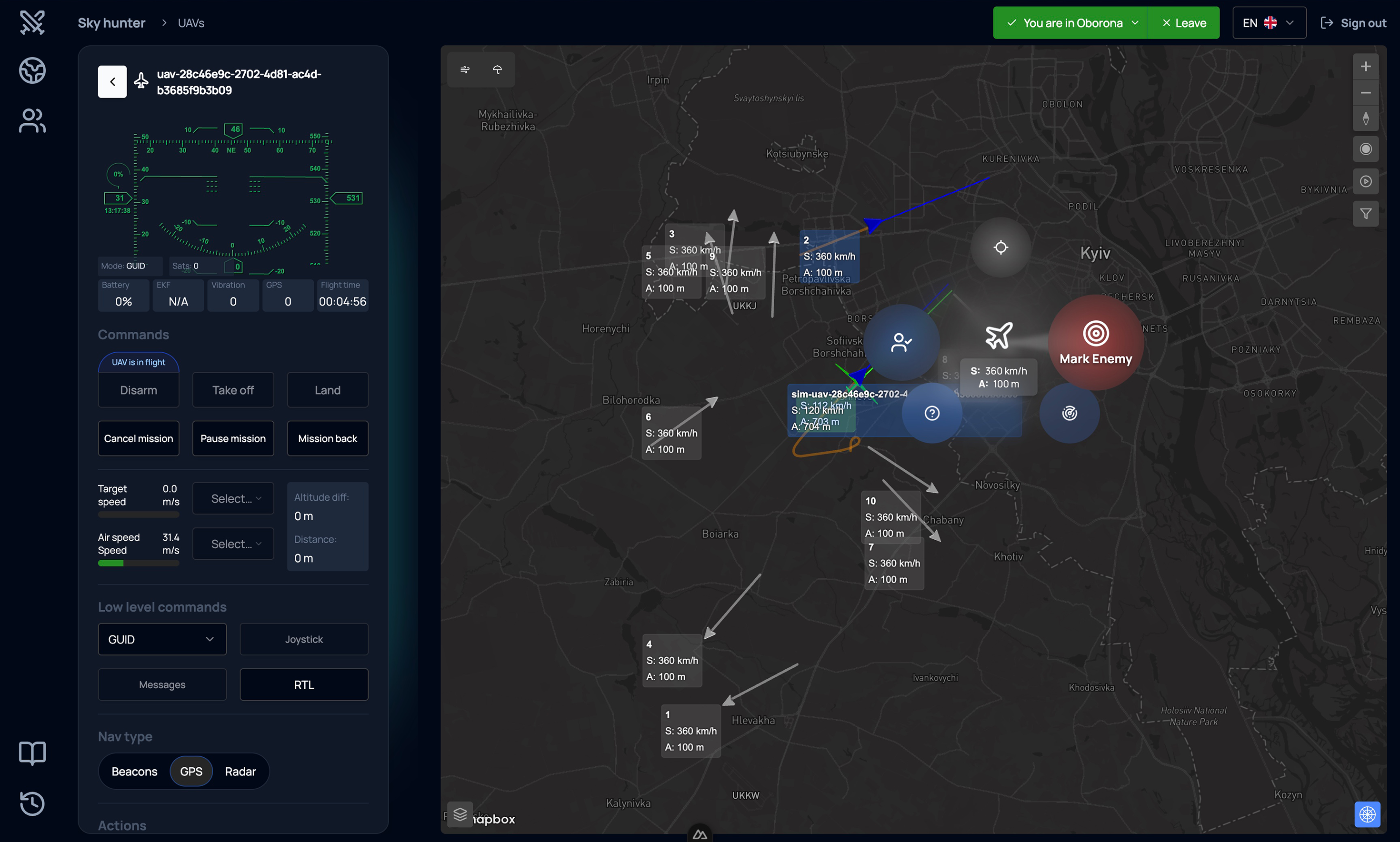
Оператор має можливість виконувати класифікацію треків. Для цього необхідно клікнути по обраному треку і в меню, що з'явилося призначити його дружнім, натиснувши на Mark Friendly
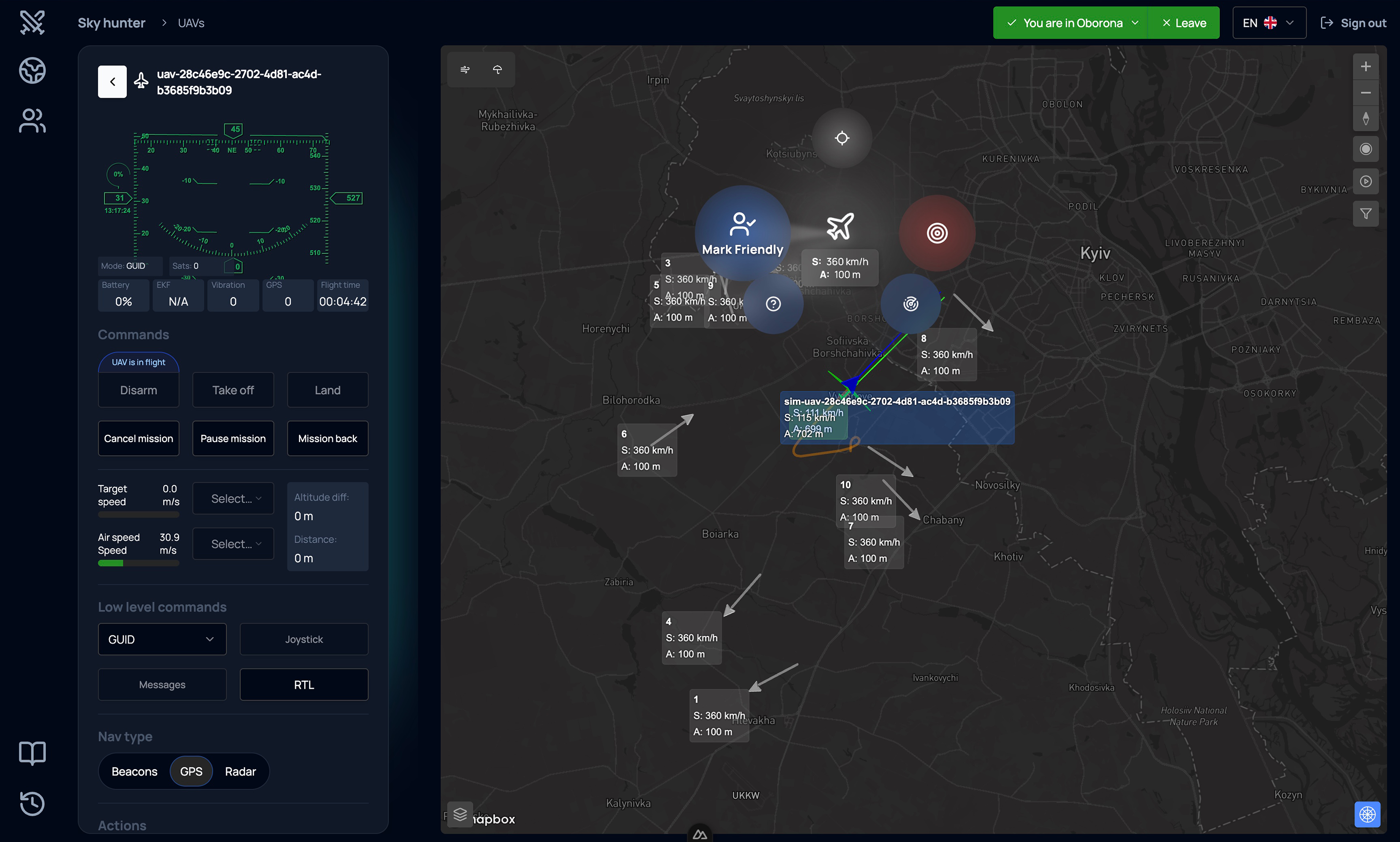
або призначити його ворожим, натиснувши на Mark Enemy.
Для скасування маркування треба клікнути на вже маркований трек, та використати команду Revert